
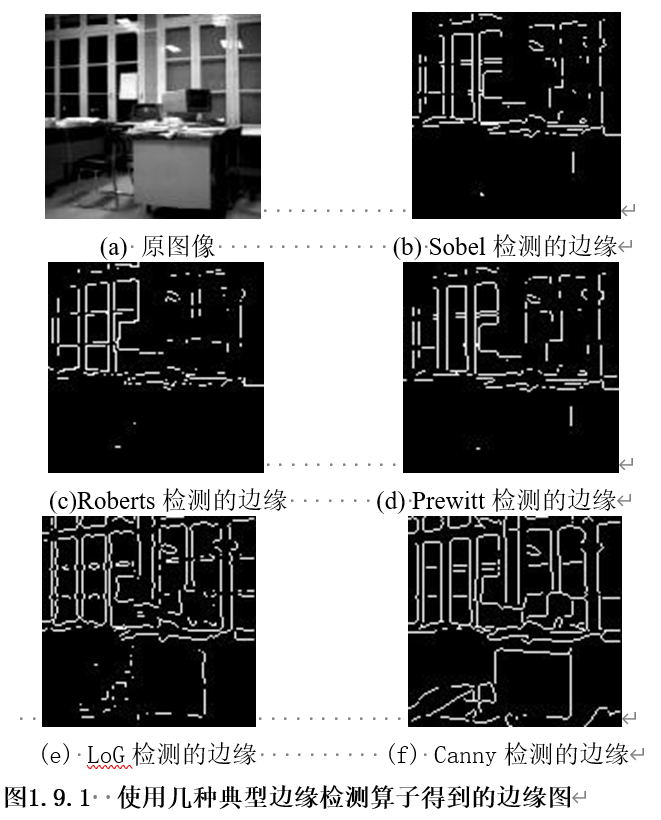
一、Roberts 边缘检测算子
二、Sobel 边缘检测算子
三、Prewitt 边缘检测算子
四、 LoG 检测器
五、Canny边缘检测器
Canny检测器的效果较好,更适合用于检测真正的弱边缘。Canny算子给出了一个好的边缘检测算子的3个指标:低失误率,即真正的边缘点尽可能提取,非边缘点尽可能不提取;高位置精度,检测的边缘应尽可能接近真实边缘;对每一个边缘点有唯一的响应,即得到单像素宽度的边缘。
六、代码

版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请联系我们举报,一经查实,本站将立刻删除。
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/233072.html原文链接:https://javaforall.net


