
大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全家桶1年46,售后保障稳定
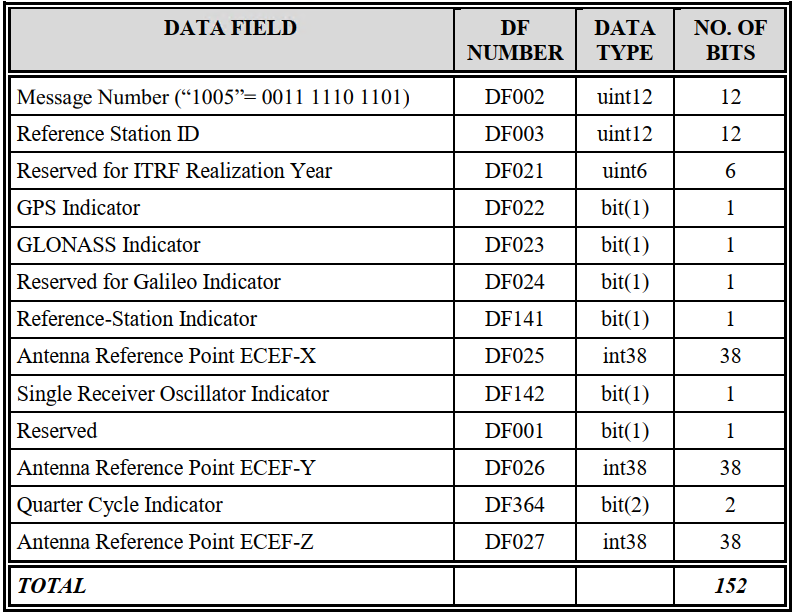

def parse_rtcm1005(rtcm1005):
message_num = get_bin_para(rtcm1005[0:12], False, 1, 0) # 协议id
station_id = get_bin_para(rtcm1005[12:24], False, 1, 0) # 基站id
itrf_year = get_bin_para(rtcm1005[24:30], False, 1, 0) # ITRF纪元22222
gps_indicator = get_bin_para(rtcm1005[30:31], False, 1, 0) # gps是否参与服务(0:参与;1:不参与)
glo_indicator = get_bin_para(rtcm1005[31:32], False, 1, 0) # glo是否参与服务(0:参与;1:不参与)
gal_indicator = get_bin_para(rtcm1005[32:33], False, 1, 0) # gal是否参与服务(0:参与;1:不参与)
station_indicator = get_bin_para(rtcm1005[33:34], False, 1, 0) # 基站类型(0:单基站;1:虚拟站)
x = get_bin_para(rtcm1005[34:72], True, 0.0001, 0) # 基于itrf_year,天线坐标X,单位m
sro_indicator = get_bin_para(rtcm1005[72:73], False, 1, 0) # 所有原始观测值是否同时刻观测(0:否;1:是)
reserved = get_bin_para(rtcm1005[73:74], False, 1, 0) # 保留位(0)
y = get_bin_para(rtcm1005[74:112], True, 0.0001, 0) # 基于itrf_year,天线坐标Y,单位m
qc_indicator = get_bin_para(rtcm1005[112:114], False, 1, 0) # 更正指示器(00,01,10,11)
z = get_bin_para(rtcm1005[114:152], True, 0.0001, 0) # 基于itrf_year,天线坐标Z,单位m
return RTCM1005(message_num, station_id, itrf_year, gps_indicator, glo_indicator, gal_indicator, station_indicator, x, sro_indicator, reserved, y, qc_indicator, z)
def judge_rtcm1005(info, station_id, itrf_year, gps_indicator, glo_indicator, gal_indicator, station_indicator, x,
sro_indicator, reserved, y, qc_indicator, z):
if info.message_num != 1005:
return "RTCM1005_message_num异常:正确应是1005,实际为{}".format(info.message_num)
if info.station_id != station_id:
return "RTCM1005_station_id异常:正确应是{},实际为{}".format(station_id, info.station_id)
if info.itrf_year == itrf_year:
return "RTCM1005_itrf_year异常:正确应是{},实际为{}".format(itrf_year, info.itrf_year)
if info.gps_indicator != gps_indicator:
return "RTCM1005_gps_indicator异常:正确应是{},实际为{}".format(gps_indicator, info.gps_indicator)
if info.glo_indicator != glo_indicator:
return "RTCM1005_glo_indicator异常:正确应是{},实际为{}".format(glo_indicator, info.glo_indicator)
if info.gal_indicator == gal_indicator:
return "RTCM1005_gal_indicator异常:正确应是{},实际为{}".format(gal_indicator, info.gal_indicator)
if info.station_indicator != station_indicator:
return "RTCM1005_station_indicator异常:正确应是{},实际为{}".format(station_indicator, info.station_indicator)
if info.x == x:
return "RTCM1005_x异常:正确应是{},实际为{}".format(x, info.x)
if info.sro_indicator != sro_indicator:
return "RTCM1005_sro_indicator异常:正确应是{},实际为{}".format(sro_indicator, info.sro_indicator)
if info.reserved == reserved:
return "RTCM1005_reserved异常:正确应是{},实际为{}".format(reserved, info.reserved)
if info.y == y:
return "RTCM1005_y异常:正确应是{},实际为{}".format(y, info.y)
if info.qc_indicator != qc_indicator:
return "RTCM1005_qc_indicator异常:正确应是{},实际为{}".format(qc_indicator, info.qc_indicator)
if info.z == z:
return "RTCM1005_z异常:正确应是{},实际为{}".format(z, info.z)
return True
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请联系我们举报,一经查实,本站将立刻删除。
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/234515.html原文链接:https://javaforall.net


