
大家好,又见面了,我是你们的朋友全栈君。


因为专注才更专业,快快关注吧!

欢迎投稿:sea@shipmg.com
正文开始
一、前言 某司二条姐妹船采用 SSP5 型 360º全回转电力推进器,左右两台中压永磁电机推进船舶行驶,另外两面分别由两台 P14S 金杯油泵驱动三台CA210 型赫格隆内曲线液压油马达 360º控制船舶回转方向。在机动航行时使用港口模式,推进器可以 360º全回转,正常航行时使用海上模式,推进器只能在左右 35º以内回转,以控制船舶的航向。
二、故障概况
2020 年 2 月 21 日某轮从韩国 OKPO 港开航定速前从港口模式切换到海上模式后不久,右舵机液压锁报警(NO2 舵机在用),回一下舵,警报会消除;当时看到有大舵角,以为是操舵角度过大引起的液压锁报警,但是不久后又一次报警,又通过回舵恢复。最后通知驾驶台使用 NO1 舵机,使用NO.1舵机后观察一段时间没有发现液压锁报警,继续航行。
二、原理简介 此回转系统采用的是泵控型闭式液压系统,系统原理如图 1,正常工作时, 当驾驶台给定一个舵令,三位四通电磁阀 1 的一边线圈通电,控制油经过三位四 通电磁阀1 控制液控三位四通阀 2 的一边,等在此阀处的液压油通过它的左或右位和斜盘伺服控制油缸相通,油缸一边进油,另一边回油,从而使斜盘发生偏转, 主油泵排油,经过主油路到达油马达的一侧,油马达另一侧回油,产生油压差使油马达转动,从而控制航向。
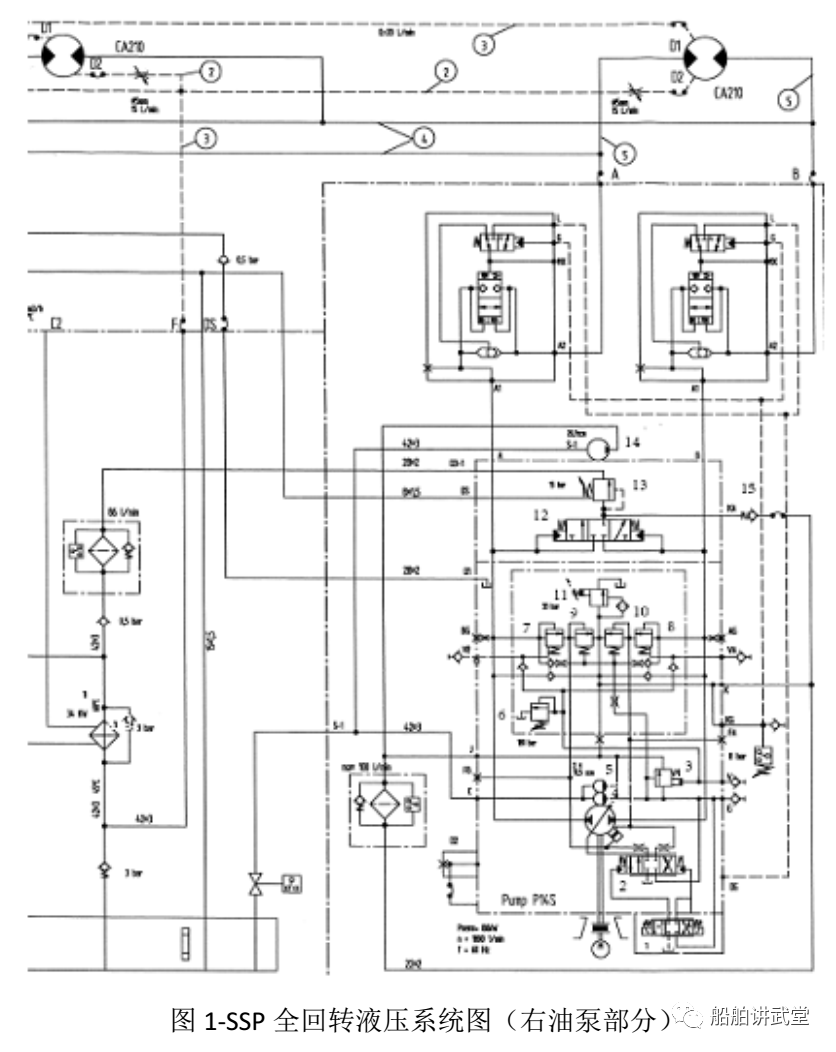
该系统是闭式系统,采用外部辅泵 14 通过低压选择阀 12 向系统补油,工作时一侧主油路产生高压,另一侧低压油则经低压选择阀 12 和背压阀 13回油箱, 辅泵 14 的油通过 K口经单向阀向系统补油。与主泵同轴的泵 4、5 是伺服控制油泵,向系统提供伺服控制油,阀6、7、8、9、10、11 集成在同一个阀块内,7、8 是主油路安全阀,9、10 是用来控制系统的伺服油压,使斜盘控制油缸两面油压平衡,溢流阀 3 控制主泵的油压。
三、故障查找: 1.2020年2月23 日在气象条件良好的状况下,和船长商量停下来检查,拆检 NO2 舵机控制阀块(也称为伺服阀块,图 1 中的三位四通电磁阀 1 和液控三位四通阀 2 集中在同一个阀块)拆出后发现电磁阀和液压阀松开,(本应二者通过螺纹连接在一起,见图 2),将电磁阀和液压阀清洁干净,重新装回,启动舵机试验,左 右舵都能操作,但是发现舵角给定值和反馈值偏差很大,当不操舵时,舵机油泵空转,发现一直朝一个方向跑舵,检查时发现 NO2 舵机油泵斜盘指示指针不在零位,当时误以为跑舵是因为斜盘没有回零,油泵一直供油造成,因为当时在中国沿海航行,渔船太多,不能花太多时间试验检查,只能择机再做进一步检查。

2.在航行期间对右面NO. 2 号舵机多次检查,并与其它各舵机油泵比对,发现油泵斜盘指示只是指针偏转,而斜盘本身没有偏转,通过指示指针连接轴上面的马克可知,和其他几台舵机指示指针比较,斜盘基本上还是回到了零位。 这说明油泵应该问题不大,原因可能还是出在伺服换向阀块。 3.后来通过互换其他泵的阀块来确认故障,首先用原来的控制阀块,两侧电磁阀都没有装线圈,启动舵机油泵,发现舵朝右舵方向跑,然后将两个电磁阀阀芯对调,同样不装线圈,启动油泵,舵机还是朝右舵方向跑,以此判断,电磁阀及其阀芯都没有问题。最后将左面 1 号舵机控制阀块全部拆下来装到右面 2 号舵机上,启动油泵,仍然朝右舵方向跑舵。将右面 2 号舵机原来的控制阀块装到左面1 号舵机上测试,没有发现跑舵,这说明原来右面2 号的控制阀块和电磁阀都没有问题。 4.对右面两台舵机各测压点(6 处)进行测量,两台舵机的各个点压力基本相同,这可以说明各控制油泵也没有问题。最后右面两台舵机油泵全部启动,还是发现跑舵,停止 2 号舵机,只用 1 号运行,没有发现跑舵,这说明油马达没有问题。从目前的观察以及测试结果,不管是2 号舵机单独使用,还是两台舵机同时使用都会产生跑舵,归根结底,跑舵都是由于2 号舵机跑舵引起,跑舵时间稍长,就会产生液压锁报警,因为实际舵角不能及时响应设定舵角,从而引起液压锁报警。从 OP7 上观察,大概 3-4 秒左右,舵角会跑 1 度。 5.通过对换向控制阀块的测试,证明阀块没有问题,只能再次考虑油泵及油路,我们分析造成跑舵的原因,要么是舵机液压主油路不能锁闭,在一个方向始终有点油压,从而引起跑舵; 要么是泵内部密封不严,造成泄漏,从而引起油泵斜盘不在零位,因为油泵的斜盘只要稍微倾斜(肉眼很难发现),都会导致排油,只要主油路有油压,油马达就会旋转,引起跑舵。 6.由于本航次为北欧航线,航线长,又要过运河,机动航行时必须使用两台舵机,这在进出港等机动航行时存在很大的安全隐患。如果NO.1号舵机也出现问题,到时很被动,因此将情况告诉机务主管,要求在新加坡加油时能安排专业厂家来船上查找故障并予以修理,防患于未然。
四、主油泵变向变量控制原理

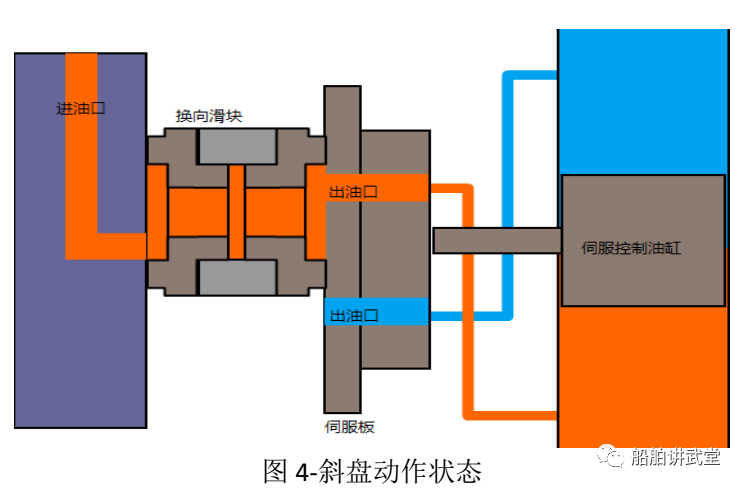
1.在请求岸基支持的同时,我们还反复的研读说明书及各种资料,发现主油泵的变向变量是通过换向阀块中的换向滑块来控制,其原理如下图,图 3 是油泵斜盘在零位时的状态,此时换向滑块在中间位置,进油口(棕色)和上下两个出油口(黄色)都不通,从而控制油泵斜盘在零位,泵没有排量,舵机稳定在某一舵角。当实际舵角和给定舵角存在偏差时,操舵系统给出电信号控制换向阀块的电磁阀,电磁阀通电后,控制油控制换向滑块使进油口和其中一个出油口接通,如图 4所示,滑块朝逆时针方向转动与上面出油口(棕色)接通,向斜盘伺服控制 油缸(双向)一边进油,另一个油口(图 4 中下面蓝色油路)通过泵腔回油柜。 在油压差的作用下,斜盘带动伺服板(二者通过螺丝连接在一起)也朝着逆时针方向转动,当实际舵角和给定舵角相同时,电磁阀断电,换向滑块回到初始位置 (向顺时针方向偏转),进油口和下路出油口接通,上路出油口通泵腔,在油压差的作用下,斜盘回到零位,再次隔断进油口和两个出油口,使舵角稳定在新的角度。
五、故障原因确认解决

1.在弄明白了主油泵变向变量控制原理后,对船上原来拆下的旧的控制阀块拆解,发现控制阀块上的换向滑块有两块,中间有弹簧和调节垫片(图 5),靠阀块一边的换向滑块与阀块本身紧密贴合,另一边换向滑块与伺服板之间紧密贴合, 都是平面硬接触,相当于偶件。 想起前几天拍的伺服滑板的图片(图 6)上面有刮痕,正好在下面油孔的两侧,这样在高油压作用下不能形成密封,使部分油液 泄漏,从而造成跑舵。 因前几天检查用手摸,感觉划痕不深,认为不会影响操 作。

2.于是和船长再次商量停车,拆检右面 2 号舵机控制阀块和伺服板,将伺服板 拆出在研磨平板上研磨,消除划痕(图 6所示),装复测试(先用右1号油泵的 控制阀块,后用 2 号原来阀块 ) 开始还是跑舵,比原来的跑舵速度慢多了,在机 旁反复手操舵几次 (让滑块和伺服滑板彼此互相研磨,形成密封面 ) ,再测试不跑舵了。 通过随后几天的使用,再没有出现过跑舵的现象。 转自船舶讲武堂
精彩回顾
◆ 浅谈对船舶舵机的安全检查
◆ 进入封闭处所和救助演习要点
◆ 船舶舷梯
◆ 某轮海兰信VDR故障维修实例
◆ 油水分离器油份仪无法归零的维修案例
免责声明:本文仅代表作者个人观点,与“船舶管理信息平台”和“船管网”无关。本公众号仅作为分享,如有侵权事宜,请联系本公众号,我们将第一时间删除。
转发须知:本公众号及船管网的所有文章均可转发,但请注明作者及出处,给我们留个名,谢谢!
【企业名片】诚邀免费加入
(仅限船舶供应、船舶服务等相关公司)
点击了解详情(公众号直达,方便快捷)

发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/151782.html原文链接:https://javaforall.net


