
蓝桥杯单片机必备知识—–(9)超声波测距
超声波测距原理:
超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。超声波在空气中的传播速度为340m/s,根据计时器记录的时间t,就可以计算出发射点距障碍物的距离(s),即:s=340t/2 。这就是所谓的时间差测距法。
超声波测距的原理是利用超声波在空气中的传播速度为已知,测量声波在发射后遇到障碍物反射回来的时间,根据发射和接收的时间差计算出发射点到障碍物的实际距离。由此可见,超声波测距原理与雷达原理是一样的。
测距的公式表示为:L=C×T
式中L为测量的距离长度;C为超声波在空气中的传播速度;T为测量距离传播的时间差(T为发射到接收时间数值的一半)。
超声波测距主要应用于倒车提醒、建筑工地、工业现场等的距离测量,虽然目前的测距量程上能达到百米,但测量的精度往往只能达到厘米数量级。
由于超声波易于定向发射、方向性好、强度易控制、与被测量物体不需要直接接触的优点,是作为液体高度测量的理想手段。在精密的液位测量中需要达到毫米级的测量精度,但是目前国内的超声波测距专用集成电路都是只有厘米级的测量精度。
核心代码:
//切记,计算距离不使用分频
sbit TX = P1^0; //发射引脚
sbit RX = P1^1; //接收引脚
void main(void)
{
cls();
AUXR = 0x80;
TMOD = 0x10; //配置定时器工作模式
TH0 = 0xcd;
TL0 = 0xd4;
TH1 = 0;
TL1 = 0;
TR0 = 1; //启动定时器
EA = 1;
ET0 = 1; //打开定时器0中断
while(1)
{
/** 100毫秒更新一次数据 */
if(s_flag)
{
s_flag = 0;
send_wave(); //发送方波信号
TR1 = 1; //启动计时
while((RX == 1) && (TF1 == 0)); //等待收到脉冲,没有计满溢出
TR1 = 0; //关闭计时
//发生溢出
if(TF1 == 1)
{
TF1 = 0;
distance = 9999; //无返回
}
else
{
/** 计算时间 */
time=TH1*256+TL1;
distance = (unsigned int)(time*0.017); //计算距离
}
TH1 = 0;
TL1 = 0;
}
}
}
//12us
void Delay12us()//@11.0592MHz
{
unsigned char i;
_nop_();
_nop_();
_nop_();
i = 30;
while (--i);
}
void send_wave()//发送八段脉冲波(40Khz)
{
unsigned char i = 8;
while(i --)
{
TX = 1;
Delay12us();
TX = 0;
Delay12us();
}
}
测试结果:


整个代码粘贴
#include <stc15f2k60s2.h>
#include "intrins.h"
#define uchar unsigned char
#define uint unsigned int
sbit TX = P1^0; //发射引脚
sbit RX = P1^1; //接收引脚
uchar tab[] = {
0xc0, 0xf9, 0xa4, 0xb0, 0x99, 0x92, 0x82, 0xf8, 0x80, 0x90, 0xff};
uchar dspbuf[] = {
10,10,10,10,10,10,10,10};
uint distance,time = 0;
uchar s_flag = 0;
void display();
void load();
void Delay12us();
void send_wave();
void cls()
{
P2 = (P2 & 0x1f) | 0x80;
P0 = 0xff;
P2 = 0x1f;
P2 = (P2 & 0x1f) | 0xa0;
P0 = 0x00;
P2 = 0x1f;
}
void main(void)
{
cls();
AUXR = 0x80;
TMOD = 0x10; //配置定时器工作模式
TH0 = 0xcd;
TL0 = 0xd4;
TH1 = 0;
TL1 = 0;
TR0 = 1; //启动定时器
EA = 1;
ET0 = 1; //打开定时器0中断
while(1)
{
/** 200毫秒更新一次数据 */
if(s_flag)
{
s_flag = 0;
/** 关闭定时器0中断:计算超声波发送到返回的时间 */
// ET0 = 0;
send_wave(); //发送方波信号
TR1 = 1; //启动计时
while((RX == 1) && (TF1 == 0)); //等待收到脉冲,没有计满溢出
TR1 = 0; //关闭计时
//发生溢出
if(TF1 == 1)
{
TF1 = 0;
distance = 9999; //无返回
}
else
{
/** 计算时间 */
time=TH1*256+TL1;
distance = (unsigned int)(time*0.017); //计算距离
}
TH1 = 0;
TL1 = 0;
}
}
}
//定时器0中断服务函数
void time0() interrupt 1 //默认中断优先级 1
{
static unsigned int intr = 0;
if(++intr == 100){
s_flag = 1;intr = 0;}
display();
}
void load()
{
dspbuf[5] = distance/100;
dspbuf[6] = distance%100/10;
dspbuf[7] = distance%10;
}
void Delay12us()//@11.0592MHz
{
unsigned char i;
_nop_();
_nop_();
_nop_();
i = 30;
while (--i);
}
void send_wave()//发送八段脉冲波(40Khz)
{
unsigned char i = 8;
while(i --)
{
TX = 1;
Delay12us();
TX = 0;
Delay12us();
}
}
void display()
{
static unsigned char dspcom = 0;
load();
P2 = (P2 & 0x1f) | 0xe0;
P0 = 0xff;
P2 = 0x1f;
P2 = (P2 & 0x1f) | 0xc0;
P0 = 1 << dspcom;
P2 = 0x1f;
P2 = (P2 & 0x1f) | 0xe0;
P0 = tab[dspbuf[dspcom]];
P2 = 0x1f;
if(++dspcom == 8) dspcom = 0;
}
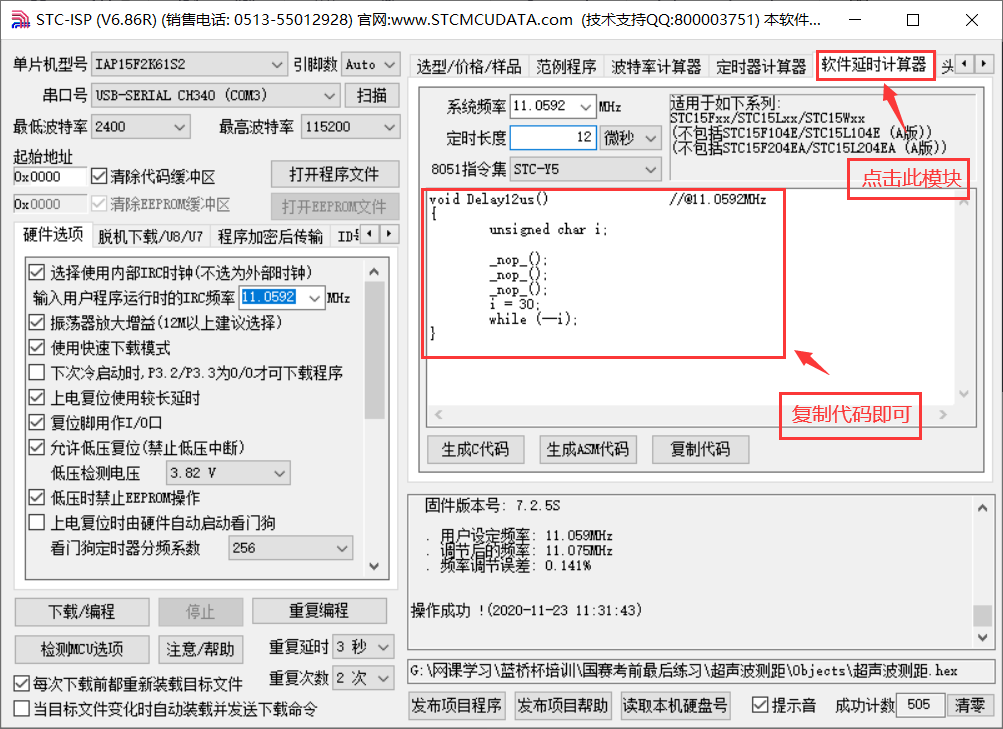
这时好多人会有疑惑,12us延时该如何做;
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请联系我们举报,一经查实,本站将立刻删除。
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/100124.html原文链接:https://javaforall.net

![tomcat日志详解[通俗易懂]](https://javaforall.net/wp-content/uploads/2020/11/2020110817443450-480x300.jpg)
