
大家好,又见面了,我是你们的朋友全栈君。
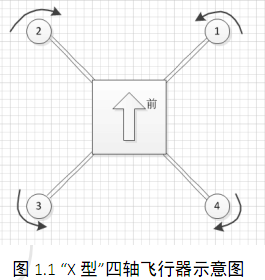
顾名思义,四轴飞行器由四个螺旋桨高速旋转产生升力,为其提供飞行动力。
四个电机转向正反各两个,可以相互抵消反扭矩。不同于常规固定翼飞机,多旋翼无人机属于静不稳定系统,因此必须依赖于强大的飞控系统才能飞行。
四轴飞行器可分为“十字型”和“X 型”,其中“十字型”机动性强主要应用在穿越机或特技表演无人机;“X 型”稳定性强,是最常见的四轴飞行器构型。本文中所介绍的飞控系统都是基于“X 型”四轴飞行器

四轴飞行器的六自由度运动如图
1. 上下运动
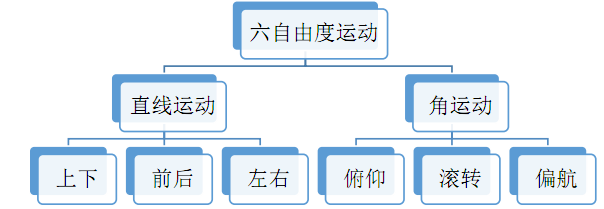
由电机油门控制,油门增大,四个电机转速同时增大,升力增大,则飞
机向上运动。
2. 前后运动
由飞机的俯仰角控制,如果飞机向前倾斜,则升力在垂线方向分量抵消
重力,在水平方向分量提供飞机向前的加速度。
3. 左右运动
由飞机的滚转角控制,原理同前后运动。
4. 俯仰运动
绕飞机机体坐标系Y 轴转动,飞机做低头运动时,1、2 号电机转速减小,
同时3、4 号电机转速增大,此时四个电机的反扭矩仍然相互抵消。
5. 滚转运动
绕飞机机体坐标系X 轴转动,原理同俯仰运动。
6. 偏航运动
绕飞机机体坐标系Z 轴转动,如果1、3 号电机转速增大,同时2、4 号
电机转速减小,此时电机反扭矩便不能相互抵消,会出现顺时针方向的
反扭矩,飞机向右偏航。
2 PID 控制算法简介
PID 控制算法用于消除期望值与实际值的误差,包括比例项P、积分项I 和微分项D。
P:又称驱动项,是消除误差的主要驱动力,这一项必须足够大。
P 项越大,系统响应速度越快,调节时间越短,但P 过大会引起系统超调、震荡甚至发散。
I:用于消除稳态误差,I 项会导致响应速度变慢,增加调节时间。
D: 又称阻尼项,为系统增加阻尼,减小超调。但这一项如果是通过微分计算得到的,会给系统引入噪声。
对于PID 控制算法网上有大量相关资料,可上网查询。要想真正掌握PID 控制算法必须要做大量调试实验,积累工程实践经验。
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请联系我们举报,一经查实,本站将立刻删除。
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/126692.html原文链接:https://javaforall.net


