
大家好,又见面了,我是你们的朋友全栈君。
最近在学习手眼标定,做下笔记,和大家分享下学习经历:
一 手眼标定的两种情形
首先讲一下在工业应用中,手和眼(摄像机)的两种位置关系,第一种是将摄像机(眼)固定在机械手(手)上面,眼随手移动;第二种是摄像机(眼)和机械手(手)分离,眼的位置相对于手是固定的,下面用网上的两张图来说明下:

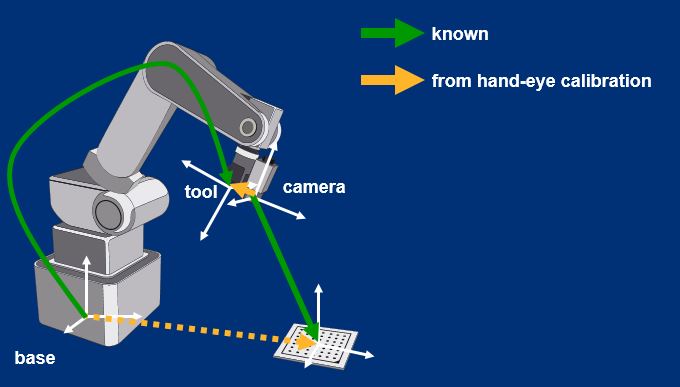
第一种情况:相机移动
第二种情况:相机固定
从上面两副示意图可以看出,第一种情况中我们要求的是相机坐标系和机械手坐标系的转化关系;第二种情况中要求的是相机坐标系和基础坐标系的关系;下面分别阐述其求解过程。
二 相机移动时,标定求解过程
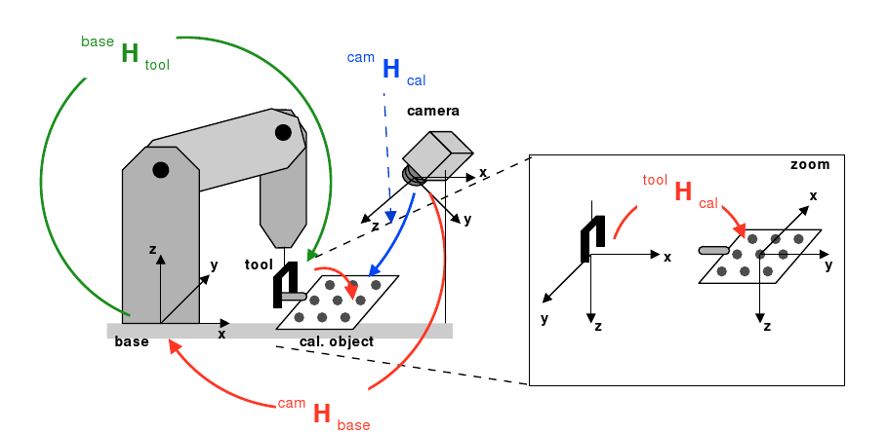
坐标系示意图
其中baseHcal表示基础坐标系到标定物坐标系的转化关系,包括旋转矩阵和平移向量;camHtool表示相机坐标系到机械手坐标系的转化关系;这两个转化关系在机械手移动过程中是不变的;camHcal可以由相机标定求出;baseHtool可以由机器人系统中得出。
接下来控制机器手从位置 1 移动到位置 2:
base = baseHtool (1)* tool(1)
tool(1) = inv(camHtool)*cam(1)
cam(1) = camHcal(1)*obj
联合上面三个公式:
base = baseHtool (1)* inv(camHtool)* camHcal(1)*obj
移动到机械手臂到位置2后:
base = baseHtool (2)* inv(camHtool)* camHcal(2)*obj
因为base和obj是固定的所以:
baseHtool (1)* inv(camHtool)* camHcal(1)=baseHtool (2)* inv(camHtool)* camHcal(2)
其中只有camHtool是未知量,具体求解过程将放在下篇文章。
三 相机固定时,标定求解过程
坐标系示意图
对于固定相机的情况,还是控制机械手从位置1移动到位置2:
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/131847.html原文链接:https://javaforall.net


