
大家好,又见面了,我是你们的朋友全栈君。
BM3D(Block-matching and 3D filtering,3维块匹配滤波)
2007-TIP-Image denoising by sparse 3D transform-domain collaborative ltering
NL-means (空间域处理)
非局部均值算法
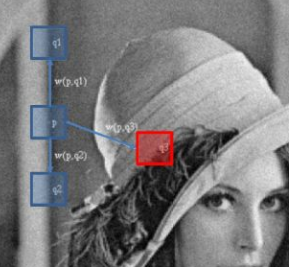

p像素的值的大小就应该为q1q2q3每个与p对应房间(像素)值的加权平均,这样就对P图像斑块完成了降噪的过程,类似一个基于大斑块的高斯滤波算法。
BM3D
把空间域和变换域的降噪方法结合起来
BM3D该算法通过相似判定找到与参考块相近的二维图像块,并将相似块按照组合成三维群组,对三维群组进行协同滤波处理,再将处理结果聚合到原图像块的位置。
把分好的图像斑块“摞起来”,形成一个3D的“块”(Block),在每一层中进行二维变换,变换到频率域,此外,在第三个维度,也就是每一层的对应的房间(像素)上进行一维变换,变换之后,按照非局部均值的思想,对斑块在频率域进行降噪处理,(其实是对像素值的加权平均),再对经过变换之后图像斑块,进行“硬阈值”处理,处理剔除不合格像素值,在经过反三维变换变换为空间域,再对图像进行块匹配,聚合至原来每个块的位置
https://zhuanlan.zhihu.com/p/81856526
主要计算量:(1)搜索匹配块(,做滤波) (2)计算权值 (3)加权平均(相当于滤波)(聚合)
图像去噪算法:NL-Means和BM3D
BM3D算法总共有两大步骤,分为基础估计(Step1)和最终估计(Step2):
在这两大步中,分别又有三小步:相似块分组(Grouping),协同滤波(Collaborative Filtering)和聚合(Aggregation)。
Stpe1:基础估计
(1) Grouping:寻找若干个差异度最小的块,并把这些块整合成一个3维的矩阵
(2) Collaborative Filtering:
首先将每个三维矩阵中的二维的块(即噪声图中的某个块)进行二维变换,可采用小波变换或DCT变换等,通常采用小波BIOR1.5。
在矩阵的第三个维度进行一维变换,通常为阿达马变换(Hadamard Transform)。
变换完成后对三维矩阵进行硬阈值处理,将小于阈值的系数置0,然后通过在第三维的一维反变换和二维反变换得到处理后的图像块。
(3) Aggregation:分别将这些块融合到原来的位置,每个像素的灰度值通过每个对应位置的块的值加权平均,权重取决于置0的个数和噪声强度。
Step2:最终估计
(1) Grouping:得到两个三维数组:噪声图形成的三维矩阵Qbasic(P)和基础估计结果的三维矩阵Q(P)。
(2) Collaborative Filtering:两个三维矩阵都进行二维和一维变换,这里的二维变换通常采用DCT变换以得到更好的效果。
(3) Aggregation:与第一步中一样
BM3D的算法复杂度是要高于NL-Means的,应该大概在NL-Means的3倍左右。
BM3D甚至宣称它可以得到迄今为止最高的PSNR。从最终的结果也可以看出来,BM3D的效果确实要好于NL-Means,噪声更少,能够更好地恢复出图像的细节。在效果这一点上BM3D胜。无愧于State-of-the-art这一称号。
http://wenhuix.github.io/research/denoise.html
处理灰度图的BM3D以及它的变体CBM3D(彩色图)、VBM3D(时域)是图像去噪领域公认的去噪效果(PSNR)最好的
https://blog.csdn.net/github_28260175/article/details/81101457
c++代码
http://www.ipol.im/pub/art/2012/l-bm3d/
147服务器 Euler系统
yum install fftw-devel fftw-doc
yum install libpng-devel
yum install libtiff-devel
yum install libjpeg-devel
make OMP=1
./BM3Ddenoising cinput.png 10 ImNoisy.png ImBasic.png ImDenoised.png ImDiff.png ImBias.png
ImDiffBias.png 1 bior 0 dct 1 opp
./BM3Ddenoising 000001.png 10 ImNoisy.png ImBasic.png ImDenoised.png ImDiff.png ImBias.png ImDiffBias.png 0 dct 0 dct 0 rgb
python版本代码
https://github.com/Ryanshuai/BM3D_py
手动安装fftw3
http://www.fftw.org/download.html
tar xvzf fftw-3.3.8.tar.gz
./configure
make & make install
http://www.52souji.net/details-about-the-installation-of-fftw.html
74服务器上 安装后路径搜不到
解决:改源再安装
ffmpeg -y -threads 16 -i input.mp4 -filter_complex “bm3d=sigma=5:block=4:bstep=2:group=1:estim=basic” output.mp4
ffmpeg -y -threads 16 -s 1920×1080 -i 5frame_1920x1080.yuv -filter_complex “bm3d=sigma=10:block=4:bstep=2:group=1:estim=basic” out.yuv
https://blog.csdn.net/Wu_qz/article/details/103153094
‘sigma’
Set denoising strength. Default value is 1. Allowed range is from 0 to 999.9
http://underpop.online.fr/f/ffmpeg/help/bm3d.htm.gz
注意:ffmpeg需要4.3.1版本
此时三维矩阵中的每个二维块均是对去噪图像的估计,分别将这些块融合到原来的位置,每个像素的强度通过每个对应位置的块的值加权平均,权重取决于置0的个数和噪声强度(标准差sigma的值)。
https://zh.wikipedia.org/wiki/%E4%B8%89%E7%BB%B4%E5%9D%97%E5%8C%B9%E9%85%8D%E7%AE%97%E6%B3%95
变体
处理灰度图的BM3D以及它的变体CBM3D(彩色图)、VBM3D(时域)是图像去噪领域公认的去噪效果(PSNR)最好的,
而BM4D、VBM4D等也都是沿袭BM3D的基于块处理(block-wise estimate)的思想,但其计算时间复杂度极大,或许只能用于离线处理(offline)
VBM3D
对中间帧的目标块搜索相似块,搜索对象是前后帧与中间帧
其余步骤与BM3D无异
https://blog.csdn.net/weixin_45250844/article/details/103153155
高光谱图像是最近几十年发展起来的一种新型遥感图像,它能更为全面、更为详细地描述地物特征。
四维块匹配滤波(Block-Matching 4D filtering,BM4D)算法是目前最新的三维图像去噪算法
由于高光谱图像是由二维空间信息和一维光谱信息组成的三维图像,因此BM4D算法适用于高光谱图像去噪处理。
http://gb.oversea.cnki.net/KCMS/detail/detail.aspx?filename=1017297313.nh&dbcode=CMFD&dbname=CMFDREF
彩色图像方法
1.将RGB图转为YUV图。
2.每一步都做如下操作:
1)只在Y(亮度通道)进行Grouping;
2)利用Y通道寻找相似块,并且在所有通道建立相似3D块
3)在每一个通道上分别使用协同滤波和 weighted aggregation.
3.再转化为RGB空间
https://blog.csdn.net/a362682954/article/details/95202003
FFTW是一个基于C写的实现傅里叶变换和小波变换的基础库
https://blog.csdn.net/weixin_44580210/article/details/105198878
幅值小,是噪声;幅值大,是有效信号
频域滤波
https://www.cnblogs.com/pingwen/p/12442257.html
图像变换域去噪算法的基本思想其实就是,首先进行某种变换,将图像从空间域转换到变换域,然后从频率上把噪声分为高中低频噪声,用这种变换域的方法就可以把不同频率的噪声分离,之后进行反变换将图像从变换域转换到原始空间域,最终达到去除图像噪声的目的。
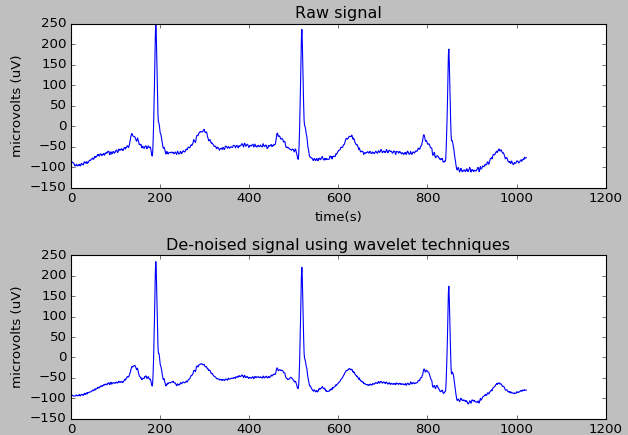
基于小波变换的图像去噪技术
主要思想是经过小波变换后图像和噪声的统计特性不同,其中图像本身的小波系数具有较大幅值,主要集中在高频,噪声小波系数幅值较小,并且存在于小波变换后的所有系数中。因此设置一个阈值门限来进行分离。
算法的基本过程为:
①对原始信号进行小波分解
②对变换后的小波系数进行阈值处理,得到估计小波系数
③根据估计小波系数进行小波重构
https://blog.csdn.net/qq_39594939/article/details/100097241
vbm3d
apt-get install fftw3 fftw3-dev pkg-config
apt-get install libpng-dev
$ mkdir build; cd build
$ cmake ..
$ make
./build/bin/VBM3Ddenoising -i zz/%06d.png -f 1 -l 1000000 -sigma 20 -deno %06d_vbm3d.png -bsic %06d_bsic.png -add false
https://github.com/tehret/vbm3d
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/133899.html原文链接:https://javaforall.net


