
大家好,又见面了,我是你们的朋友全栈君。
图文详解PID调参
读完本篇文章你的收获:
- PID三个参数基本概念
- 了解如何调节PID
- 认识一个经常咕咕咕的博主
先上效果图:

一、什么是PID
在工程中,如果我们要用单片机做一个温控系统,其系统组成一般如下:一个采集温度的ADC,一个输出温度的加热头以及一个用于运行控制算法的单片机,如果我们要维持温度为100度,在不加任何控制算法的情况下,我们可以通过简单的阈值判断法来控制温度,一个if判断语句,当采集到的温度大于100时,单片机控制加热头关闭,当采集的温度小于100度时,单片机则控制加热头开启,简单粗暴,但这样的控制方法,最终所展示出来的温度曲线是极其不稳定的,他会由于控制器件的灵敏程度、加热头的性能等等原因,导致最终的温度曲线会在目标周围震荡,达不到理想的控制效果,就像下图:实际曲线(黑线) 在 目标曲线(红线) 周围抖动
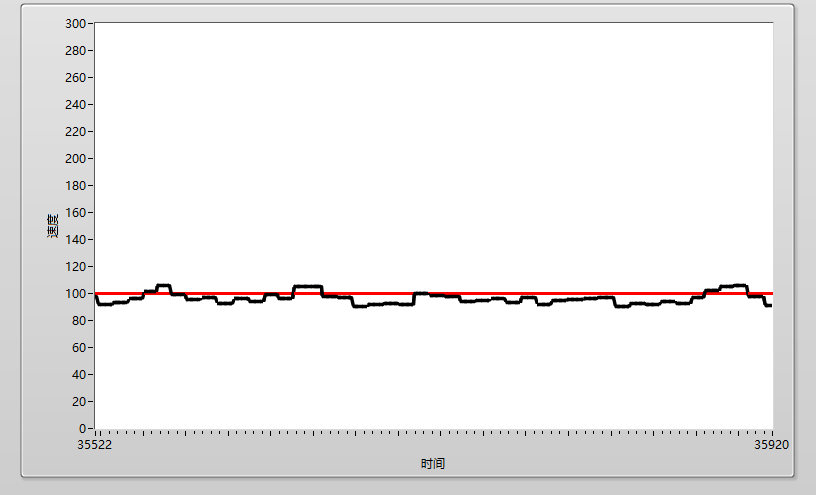
那如何才能维持实际曲线与目标曲线贴合,达到一个稳定的控制效果呢?
这里就引入了PID控制算法的概念,PID是 Proportion Integration Differentiation 的缩写,实际上他就是一个公式,由比例项(Proportion ),积分项(Integration ),微分项(Differentiation) 三个部分组成,具体形式就是下面的公式:

其中 err(t) 就是当前值和目标值的误差,PID的公式就是对这个误差分别进行比例、积分、微分处理后叠加输出,因为比例计算、积分计算、微分计算在数学公式上的计算定义不同,所以对应的项的输出特性和输入特性也有着不同,具体解释如下:
1. 比例系数
比例控制系数,实际上就是先简单的定义输入与输出的线性关系,假如我们输出控制量的值得范围在 100-1000,输入的err误差范围却在0.001-0.1;当误差为0.1的时候输出量需要到达到1000,这时我们就需要通过比例系数来构建输入与输出的线性关系
2. 积分系数
上一点我们分析了比例系数的含义,有小伙伴可能会好奇,比例系数加上后的效果其实和阈值判断原理没什么区别,确实是这样,只用上比例系数的效果和阈值判断没什么区别,但别忘了,PID后面还有I和D两项,其中I项的理解我们可以从积分的含义来理解,积分可以理解为在坐标平面上,由曲线、直线以及轴围成的曲形的面积值,这个曲线就是err(t)的函数,这个积分面积值就是代表过去一段时间的误差累计值,我们把这个累计值乘以系数进行变换后,叠加到输出上,就可以一定程度上消除历史误差对当前实际曲线的影响,提高系统的稳定性
3. 微分系数
微分的数学理解可以理解为当前误差曲线的斜率,他可以用来预测当前曲线的未来走势,对微分项的值进行处理后叠加,就可以预测当前值的未来趋势,提高系统对未来变化反应能力
二、PID调节方式
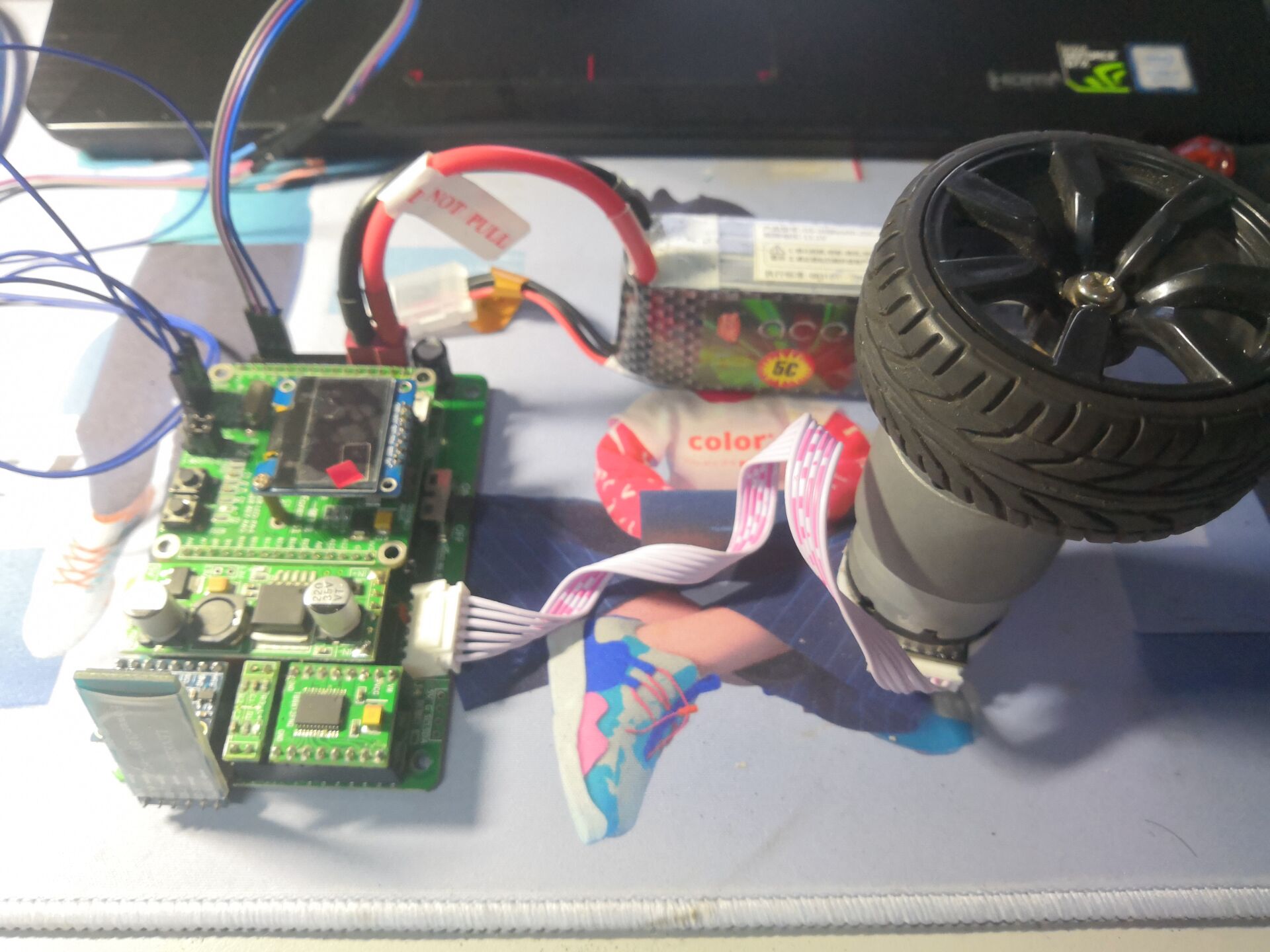
通过上一小节的分析,我们对PID的三个项有了一个简单的理解,但文字上的描述还是太抽象了,我以一个小车调速系统来做进一步讲解,结合实际现象来分析PID三个参数的实际作用,以及如何调这三个参数,用到的实验平台如下
-
平衡小车之家的主控板及电机
-
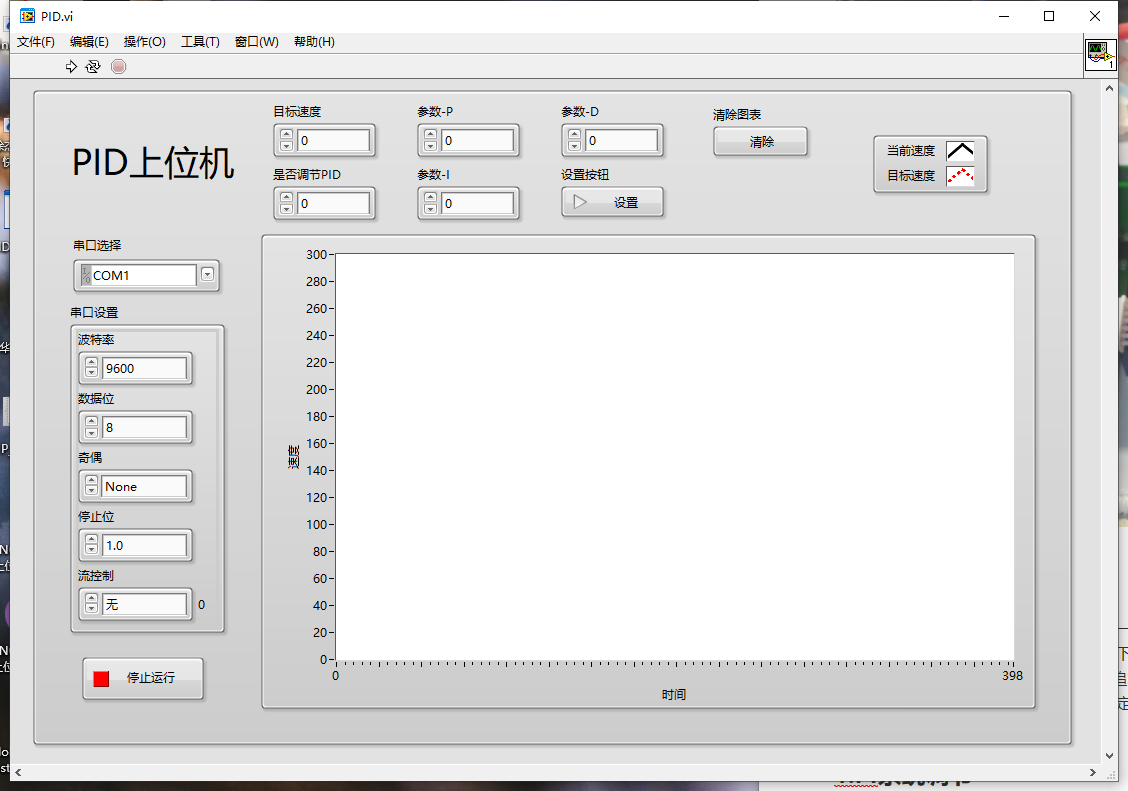
自己编写的调试上位机
控制系统图片:
上位机界面:
我们在使用PID的时候,单独只使用一个参数是没有意义的至少使用两个参数,并且P(比例项)是必须要有的,虽然PID有三个参数,但大多数情况下PID三个参数并不是都使用上的,一般会其中两个来组合使用,比如PI组合用于追求稳定的系统,PD组合用于追求快速响应的系统,当然PID用于即追求稳定又追求快速响应的系统,但是实际上PID参数越多越难调,而且许多情况下两个参数的效果已经足够了,所以我一般根据情况使用前两个,下面对这几个系统都做一个分析
1.PI系统调节
调节PI系统的第一步就是先调节P,由小到大依次调节,P的值可以很明显的在输出曲线体现出来,比如我先给P=0.05,系统反应如下,当P过小时,曲线呈现缓慢上升,且最终值会明显低于目标值
当我们加大P到0.15时,我们可以看到实际曲线很快的接近目标值,但因为只有单纯P控制,所以有较大的过冲(过冲就是实际值达到目标值时刹不住车,冲出去了),但在他稳定的时候,实际曲线基本接近目标曲线
如果P再增大到0.25,可以看到,实际曲线需要震荡很久才会达到稳定目标线,但在稳定后基本和目标线保持一致
如果P过大,整个系统就会不受控,实际曲线不会收敛到目标曲线位置,出现等幅震荡,比如P=0.45时
在调节PI系统时,P的选取一般有两种情况
-
P偏小一点,稳定时,实际值在目标值之下,一直存在误差,这时再从0开始,一直加大I,消除稳定时的误差,这种情况下的最终稳定曲线会一直保持在目标曲线之下,达到比较稳定的调节效果,不会有过冲
(无过冲,稳定!)
-
P大一点,在第一次到达目标值的时候有一定的过冲,但之后就会稳定,其与第一种相比反应速度更快!
(有过冲,但他快!)
下面展示第一种PI控制方式,选取P=0.5(偏小)时,再用I消除稳定时的稳态误差,达到稳定的效果:
I积分的值这里我展示了三个,分别为较小,刚好,和较大时的实际曲线,用来做对比!
P=0.5,I=0.00005,I选取较小,可以看到相对于单纯的P=0.5,稳定误差有一定消除,但消除程度不够!
在加大I到0.0001,刚刚好的时候,实际曲线和目标曲线基本重合!!!
当I过大取0.002时,因为累计误差占比过大,就会出现抖动现象,难以收敛
上面就是第一种PI调节情况,虽然PI系统平衡过程很稳定,但到达目标位置的反应速度较慢,有的时候为了提高反馈速度,适当的提高P,允许有一定的过冲,比如我取P=0.07,对应的I取0.0001时,波形如下,该系统允许一定的过冲,但可以更快的到达目标点后再趋于稳定,这就是第二种PI系统的调节方式,
以上基本就是PI系统的调节过程了,下面我讲一下PD系统的调节过程
2.PD系统调节
由一开始的概念我们可以知道,与 I 的不同点在于,I是计算累计误差,而D则是计算未来趋势,因此PD系统的反应速度更快,相对于PI系统会更快的到达目标位置附近,其调节方式首先还是调节P,这里我们根据PI中P的调节结果,调节P到比大的位置,出现一定的过冲,这里取P=0.15,不加D的时候图形如下:
从图像可以看出:P=0.15在开始时过冲严重,所以加上一个D来减小过冲幅度,D的选取和I的选取一样,从0慢慢增加,观看效果确定合适的点,下面一张图的D=1.5是我试出来比较合适的点,我们可以看到加上合适的D之后,实际曲线到达目标位置的时间更短,过冲幅度也降低了一些,但是这里效果不是很明显,主要原因是我这里使用的是小车轮子来做的速度PID,而PD的应用场合主要是大惯性系统中,这里的应用场景不适合,但也能看出一定效果
如果D调节的过大之后,反倒会放大系统趋势的影响,使系统出现震荡,难以稳定,如下D=5
3.PID系统调节
在讲了PI和PD系统的调节方式后,下面分享一下PID系统的调节方式,首先我们先按照PI系统进行调节,先调P在调I,让系统有一定的过冲后达到稳定,如下图:
在出现了上面的 PI 波形之后,下面就开始调节D,慢慢增加D,将过冲补偿掉,直到系统稳定,最终效果如下图,PID系统就基本调节完成了
这篇文章的PID讲解内容就到这里了,下一篇文章将会详细分享我常使用的PID调用代码,帮助大家PID进一步入门
第二篇已更新,文章链接:从0编写一份PID控制代码
铁子们!觉得有用就一键三连吧!
往期精选文章推荐
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/135007.html原文链接:https://javaforall.net


