
大家好,又见面了,我是你们的朋友全栈君。
PS2手柄遥控控制灯开关(arduino)
使用的材料
arduino板子:
ps2遥控手柄;
一个5V供电的LDE;


连线
首先按照遥控手柄底座上的英文,你会发现一共有六根线,分别是GND,VCC,DAT,CMD,CS,CL。GND连接arduino板子上的gnd,vcc连接5V或者3.3v,其他四根线可以按照代码中的引脚设置连接,也可以自己更改。
代码部分
#include <PS2X_lib.h> //for v1.6
/******************************************************************
* set pins connected to PS2 controller:
* - 1e column: original
* - 2e colmun: Stef?
* replace pin numbers by the ones you use
******************************************************************/
#define PS2_DAT 13 //14
#define PS2_CMD 11 //15
#define PS2_SEL 10 //16
#define PS2_CLK 12 //17
const int led = 7; //LED灯其中一根线接gnd,一根接引脚7
int buttonstate = 0 ; //初始化灯不亮
/******************************************************************
* select modes of PS2 controller:
* - pressures = analog reading of push-butttons
* - rumble = motor rumbling
* uncomment 1 of the lines for each mode selection
******************************************************************/
//#define pressures true
#define pressures false
//#define rumble true
#define rumble false
PS2X ps2x; // create PS2 Controller Class
//right now, the library does NOT support hot pluggable controllers, meaning
//you must always either restart your Arduino after you connect the controller,
//or call config_gamepad(pins) again after connecting the controller.
int error = 0;
byte type = 0;
byte vibrate = 0;
void setup(){
pinMode(led,OUTPUT);
Serial.begin(57600);
delay(300); //added delay to give wireless ps2 module some time to startup, before configuring it
//CHANGES for v1.6 HERE!!! **************PAY ATTENTION*************
//setup pins and settings: GamePad(clock, command, attention, data, Pressures?, Rumble?) check for error
error = ps2x.config_gamepad(PS2_CLK, PS2_CMD, PS2_SEL, PS2_DAT, pressures, rumble);
if(error == 0){
Serial.print("Found Controller, configured successful ");
Serial.print("pressures = ");
if (pressures)
Serial.println("true ");
else
Serial.println("false");
Serial.print("rumble = ");
if (rumble)
Serial.println("true)");
else
Serial.println("false");
Serial.println("Try out all the buttons, X will vibrate the controller, faster as you press harder;");
Serial.println("holding L1 or R1 will print out the analog stick values.");
Serial.println("Note: Go to www.billporter.info for updates and to report bugs.");
}
else if(error == 1)
Serial.println("No controller found, check wiring, see readme.txt to enable debug. visit www.billporter.info for troubleshooting tips");
else if(error == 2)
Serial.println("Controller found but not accepting commands. see readme.txt to enable debug. Visit www.billporter.info for troubleshooting tips");
else if(error == 3)
Serial.println("Controller refusing to enter Pressures mode, may not support it. ");
// Serial.print(ps2x.Analog(1), HEX);
type = ps2x.readType();
switch(type) {
case 0:
Serial.print("Unknown Controller type found ");
break;
case 1:
Serial.print("DualShock Controller found ");
break;
case 2:
Serial.print("GuitarHero Controller found ");
break;
case 3:
Serial.print("Wireless Sony DualShock Controller found ");
break;
}
}
void open() {
}
void loop() {
/* You must Read Gamepad to get new values and set vibration values
ps2x.read_gamepad(small motor on/off, larger motor strenght from 0-255)
if you don't enable the rumble, use ps2x.read_gamepad(); with no values
You should call this at least once a second
*/
if(error == 1) //skip loop if no controller found
return;
if(type == 2){ //Guitar Hero Controller
ps2x.read_gamepad(); //read controller
if(ps2x.ButtonPressed(GREEN_FRET))
Serial.println("Green Fret Pressed");
if(ps2x.ButtonPressed(RED_FRET))
Serial.println("Red Fret Pressed");
if(ps2x.ButtonPressed(YELLOW_FRET))
Serial.println("Yellow Fret Pressed");
if(ps2x.ButtonPressed(BLUE_FRET))
Serial.println("Blue Fret Pressed");
if(ps2x.ButtonPressed(ORANGE_FRET))
Serial.println("Orange Fret Pressed");
if(ps2x.ButtonPressed(STAR_POWER))
Serial.println("Star Power Command");
if(ps2x.Button(UP_STRUM)) //will be TRUE as long as button is pressed
Serial.println("Up Strum");
if(ps2x.Button(DOWN_STRUM))
Serial.println("DOWN Strum");
if(ps2x.Button(PSB_START)) //will be TRUE as long as button is pressed
Serial.println("Start is being held");
if(ps2x.Button(PSB_SELECT))
Serial.println("Select is being held");
if(ps2x.Button(ORANGE_FRET)) { // print stick value IF TRUE
Serial.print("Wammy Bar Position:");
Serial.println(ps2x.Analog(WHAMMY_BAR), DEC);
}
}
else { //DualShock Controller
ps2x.read_gamepad(false, vibrate); //read controller and set large motor to spin at 'vibrate' speed
if(ps2x.Button(PSB_START)) //will be TRUE as long as button is pressed
Serial.println("Start is being held");
if(ps2x.Button(PSB_SELECT))
Serial.println("Select is being held");
if(ps2x.Button(PSB_PAD_UP)) { //will be TRUE as long as button is pressed
Serial.print("Up held this hard: ");
Serial.println(ps2x.Analog(PSAB_PAD_UP), DEC);
}
if(ps2x.Button(PSB_PAD_RIGHT)){
Serial.print("Right held this hard: ");
Serial.println(ps2x.Analog(PSAB_PAD_RIGHT), DEC);
}
if(ps2x.Button(PSB_PAD_LEFT)){
Serial.print("LEFT held this hard: ");
Serial.println(ps2x.Analog(PSAB_PAD_LEFT), DEC);
}
if(ps2x.Button(PSB_PAD_DOWN)){
Serial.print("DOWN held this hard: ");
Serial.println(ps2x.Analog(PSAB_PAD_DOWN), DEC);
}
vibrate = ps2x.Analog(PSAB_CROSS); //this will set the large motor vibrate speed based on how hard you press the blue (X) button
if (ps2x.NewButtonState()) { //will be TRUE if any button changes state (on to off, or off to on)
if(ps2x.Button(PSB_L3))
Serial.println("L3 pressed");
if(ps2x.Button(PSB_R3))
Serial.println("R3 pressed");
if(ps2x.Button(PSB_L2))
Serial.println("L2 pressed");
if(ps2x.Button(PSB_R2))
Serial.println("R2 pressed");
if(ps2x.Button(PSB_TRIANGLE))
Serial.println("Triangle pressed");
}
if(ps2x.ButtonPressed(PSB_CIRCLE)) { //will be TRUE if button was JUST pressed
Serial.println("Circle just pressed");
buttonstate=!buttonstate; //按下圆圈键状态改变
if (buttonstate) { //如果状态为1,亮
digitalWrite(led,HIGH);
}
else{ //为0则不亮
digitalWrite(led,LOW);
}
}
if(ps2x.NewButtonState(PSB_CROSS)) //will be TRUE if button was JUST pressed OR released
Serial.println("X just changed");
if(ps2x.ButtonReleased(PSB_SQUARE)) //will be TRUE if button was JUST released
Serial.println("Square just released");
if(ps2x.Button(PSB_L1) || ps2x.Button(PSB_R1)) { //print stick values if either is TRUE
Serial.print("Stick Values:");
Serial.print(ps2x.Analog(PSS_LY), DEC); //Left stick, Y axis. Other options: LX, RY, RX
Serial.print(",");
Serial.print(ps2x.Analog(PSS_LX), DEC);
Serial.print(",");
Serial.print(ps2x.Analog(PSS_RY), DEC);
Serial.print(",");
Serial.println(ps2x.Analog(PSS_RX), DEC);
}
}
delay(50);
}
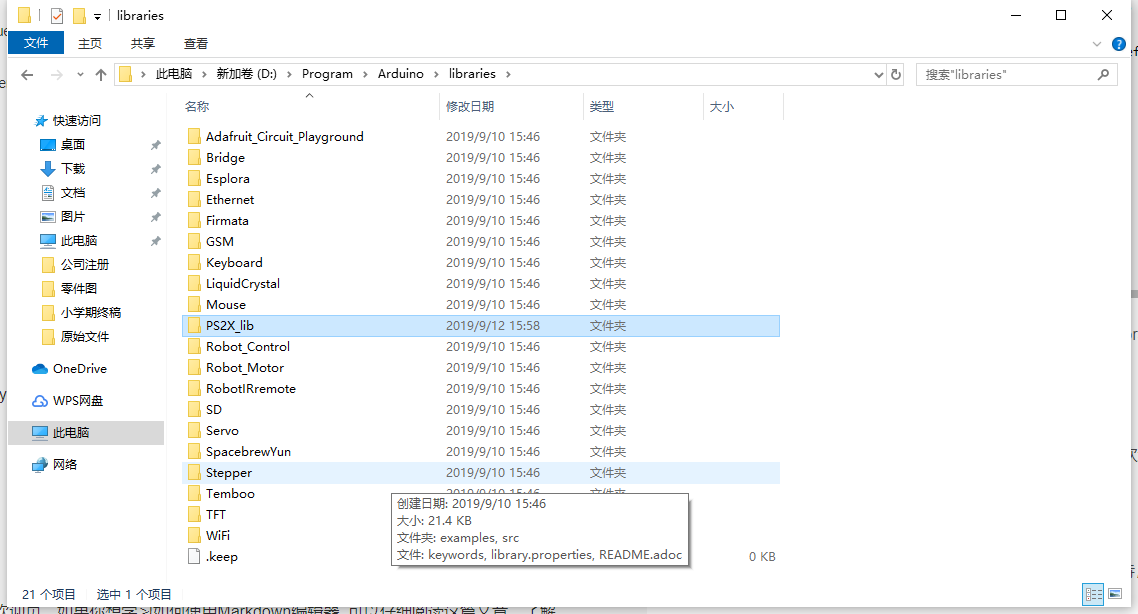
注意:需要将PS2X_lib提前放置arduino安装目录下的library,可以直接试该库内教程文件PS2X_Example,将串口监视器中的波特率记得改为57600,否则按下按键反馈为一串乱码。PS2X_lib网上可以找得到,也可以通过我博客资源下载。
最终效果
这里录了一个简单的视频,初始时候LED灯不亮,按下圆键时候亮起,再次按即关闭。
几秒钟的视频附在链接里。-
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请联系我们举报,一经查实,本站将立刻删除。
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/136284.html原文链接:https://javaforall.net


