
大家好,又见面了,我是你们的朋友全栈君。
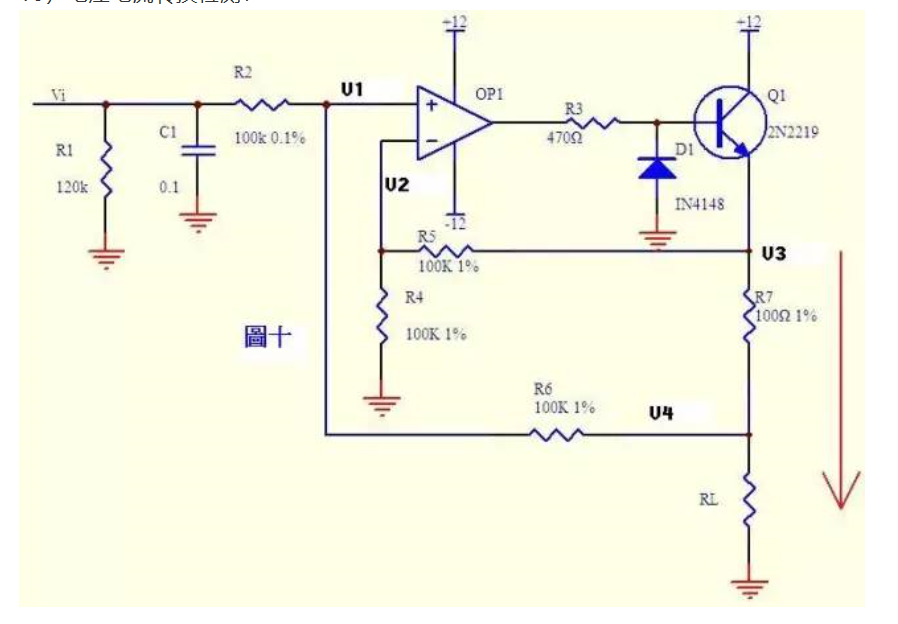

电流可以转换成电压,电压也可以转换成电流。图十就是这样一个电路。上图的负反馈没有通过电阻直接反馈,而是串联了三极管Q1的发射结,大家可不要以为是一个比较器就是了。只要是放大电路,虚短虚断的规律仍然是符合的!
由虚断知,运放输入端没有电流流过,
则(Vi–V1)/R2=(V1–V4)/R6……a
同理(V3–V2)/R5=V2/R4……b
由虚短知V1=V2……c
如果R2=R6,R4=R5,则由abc式得V3-V4=Vi
上式说明R7两端的电压和输入电压Vi相等,则通过R7的电流I=Vi/R7,如果负载RL<<100KΩ,则通过Rl和通过R7的电流基本相同。
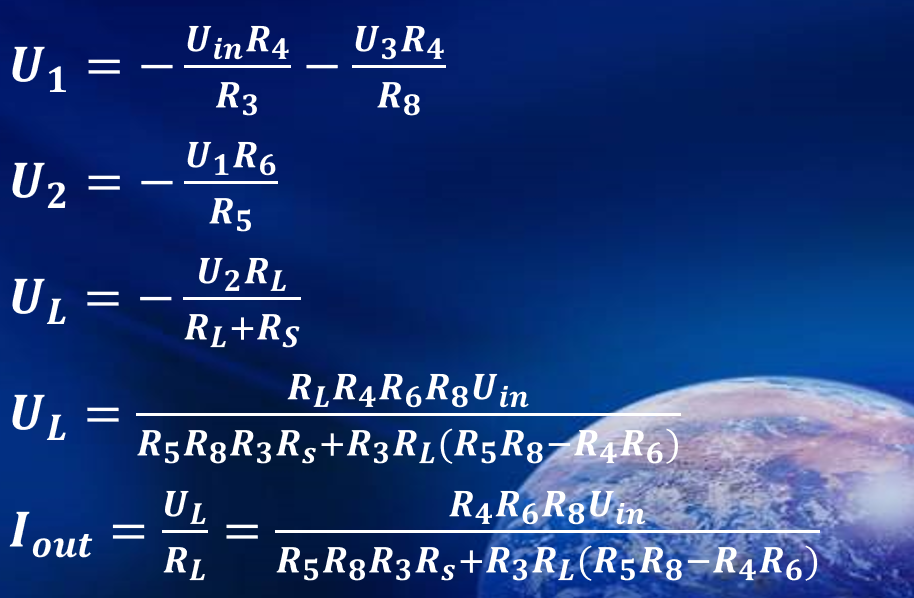
注:UL=-U2*RL/(RL+RS)的负号去掉
注:UL=-U2*RL/(RL+RS)的负号去掉
注:UL=-U2*RL/(RL+RS)的负号去掉
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请联系我们举报,一经查实,本站将立刻删除。
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/137125.html原文链接:https://javaforall.net


