
大家好,又见面了,我是你们的朋友全栈君。
准毕业本科狗在指导老师的带领下,打算做一个使用履带机器人。以前也接触过一点树莓派,就打算用树莓派作为主控板(虽然有点傻),一方面也考虑了后续要使用opencv库作图像处理。做的时候,想一开始用ps2手柄控制机器人,奈何网上资料都是stm32和arduino的。
经过几天的查资料,我找到了micropython的ps2库(参考资料),但是为了直接使用树莓派自带的gpio,我稍微对程序做了一点修改,希望能给需要的同学一点帮助。
import time
import RPi.GPIO as gpio
PSB_SELECT = 1
PSB_L3 = 2
PSB_R3 = 3
PSB_START = 4
PSB_PAD_UP = 5
PSB_PAD_RIGHT = 6
PSB_PAD_DOWN = 7
PSB_PAD_LEFT = 8
PSB_L2 = 9
PSB_R2 = 10
PSB_L1 = 11
PSB_R1 = 12
PSB_GREEN = 13
PSB_RED = 14
PSB_BLUE = 15
PSB_PINK = 16
PSB_TRIANGLE = 13
PSB_CIRCLE = 14
PSB_CROSS = 15
PSB_SQUARE = 26
#右摇杆X轴数据
PSS_RX = 5
PSS_RY = 6
PSS_LX = 7
PSS_LY = 8
comd = [0x01, 0x42] #开始指令
data = [0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00]#数据存储数组
mask=[
PSB_SELECT,
PSB_L3,
PSB_R3 ,
PSB_START,
PSB_PAD_UP,
PSB_PAD_RIGHT,
PSB_PAD_DOWN,
PSB_PAD_LEFT,
PSB_L2,
PSB_R2,
PSB_L1,
PSB_R1 ,
PSB_GREEN,
PSB_RED,
PSB_BLUE,
PSB_PINK
] #按键值与按键说明
class PS2KEY:
def __init__(self,DAT,CMD,CS,CLK):
gpio.setmode(gpio.BCM) #选择 gpio numbers 编号系统
gpio.setwarnings(False)
# 设置gpio口为输出
gpio.setup(DAT, gpio.IN, pull_up_down=gpio.PUD_DOWN)
gpio.setup(CMD, gpio.OUT)
gpio.setup(CS, gpio.OUT)
gpio.setup(CLK, gpio.OUT)
self.DAT = DAT
self.CMD = CMD
self.CS = CS
self.CLK = CLK
self.ps2_init()
#self.ps2_red()
#手柄初始化
def ps2_init(self):
gpio.output(self.CS, True)
gpio.output(self.CLK, True)
gpio.output(self.CMD, True)
time.sleep(0.01)
#发送数据
def ps2_cmd(self,cmd):
global data
data[1]=0
for ref in (1,2,4,8,16,32,64,128):
if (ref & cmd):
gpio.output(self.CMD, True)
else:
gpio.output(self.CMD, False)
gpio.output(self.CLK, True)
time.sleep(0.00005)
gpio.output(self.CLK, False)
time.sleep(0.00005)
gpio.output(self.CLK, True)
if(gpio.input(self.DAT)):
data[1]=ref|data[1]
time.sleep(0.000016)
#判断是否为红灯模式 是--返回0 否--返回1
def ps2_red(self):
global data
global comd
gpio.output(CS, False)
self.ps2_cmd(comd[0])
self.ps2_cmd(comd[1])
gpio.output(CS, True)
if(data[1]==57):
return 0#red light
else:
return 1#not red
#读取手柄数据
def ps2_read(self):
global data
global comd
byte=0
ref=0x01
gpio.output(self.CS, False)
self.ps2_cmd(comd[0])
self.ps2_cmd(comd[1])
for byte in (2,3,4,5,6,7,8):
for ref in (1,2,4,8,16,32,64,128):
gpio.output(self.CLK, True)
gpio.output(self.CLK, False)
time.sleep(0.00005)
gpio.output(self.CLK, True)
if(gpio.input(self.DAT)):
data[byte]=ref|data[byte]
time.sleep(0.00005)
gpio.output(self.CS, True)
#清空data
def ps2_clear(self):#ok
global data
for i in range(9):
data[i]=0
#输出摇杆数据(0-255)
def ps2_andata(self,button):
global data
return data[button]
#输出按下的按键对应编号
def ps2_key(self):
global data
global mask
self.ps2_clear()
self.ps2_read()
handkey=(data[4]<<8)|data[3]
for index in range(16):
if ((handkey&(1<<(mask[index]-1)))==0):
return index+1
return 0
实物连接图

这里测试了手柄△、□、○、×这几个按键返回的值。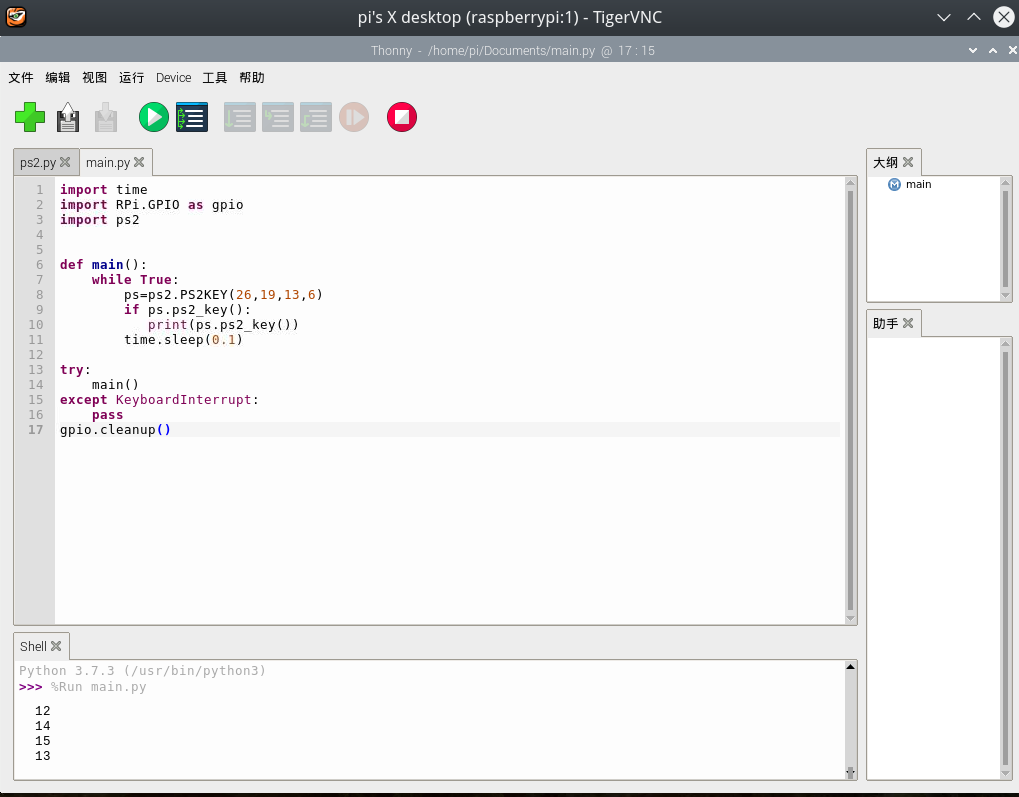
PS:这是我第一次写博客,有错误请多多指教!!谢谢!
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请联系我们举报,一经查实,本站将立刻删除。
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/137628.html原文链接:https://javaforall.net


