
大家好,又见面了,我是你们的朋友全栈君。
生生不息,“折腾”不止;Java晋升指北,让天下没有难学的技术;视频教程资源共享,学习不难,坚持不难,坚持学习很难; >>>>
Eclipse中Editor does not contain a main type 解决方法
1、问题再现

2、原因
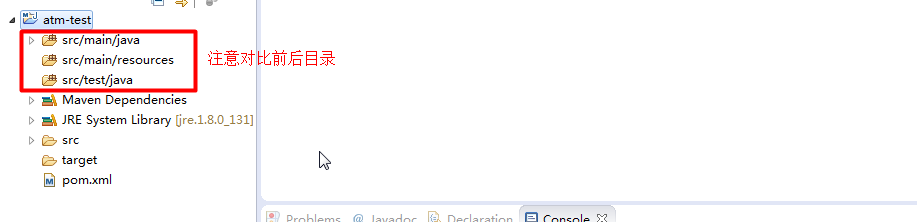
- 当前的源代码(所有的包)没有被添加到build path中
- src目录出现错误
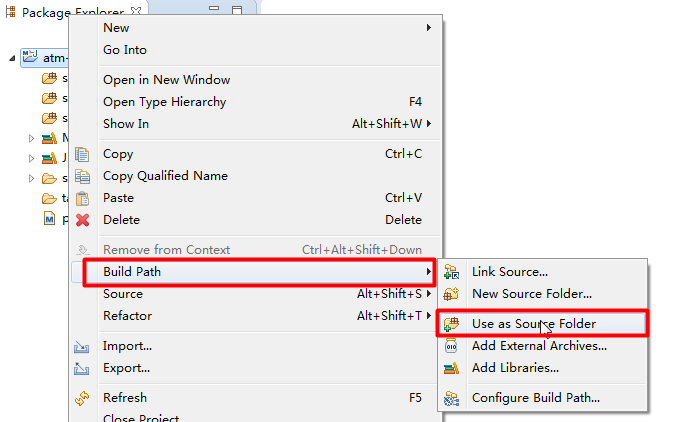
3、解决方法
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请联系我们举报,一经查实,本站将立刻删除。
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/138005.html原文链接:https://javaforall.net


