
大家好,又见面了,我是你们的朋友全栈君。
项目需要一个人脸识别追踪的效果,所以查找了一些资料,自己做了一个功能,基本效果已经实现了。
首先项目需要OpenCV的开发环境,所以首先一定要在开发电脑上装上OpenCV的开发环境,流程很简单,直接去http://opencv.org/downloads.html官网下载OpenCV的安装文件就可以了,然后配置电脑的环境变量。我的电脑是windows操作系统
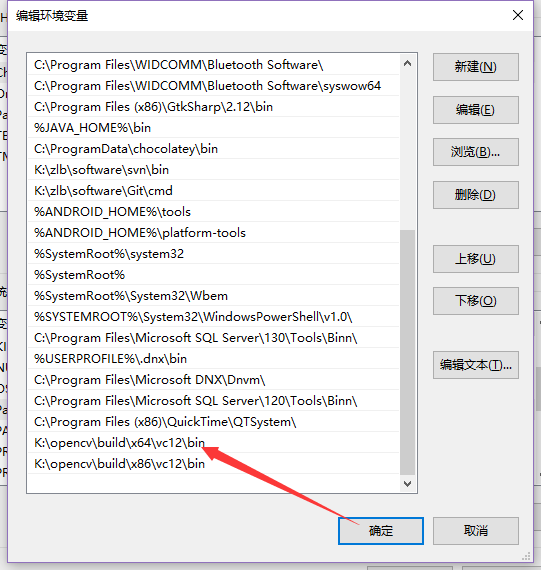
配置好就是这个样子,然后要把用到的dll文件导入进unity工程中,然后下面附上主要代码
using UnityEngine;
using System.Collections;
using OpenCvSharp;
public class VideoTest : MonoBehaviour
{
private Camera _camera;
public GameObject Slice;
Material m_material;
public GameObject m_Cube;
public WebCamTexture cameraTexture;
Texture2D rt;
private string cameraName = "";
private bool isPlay = true;
static int mPreviewWidth = 320;//(这个分辨率可以自己调,分辨率越高越卡,我的电脑这个就刚刚好)
static int mPreviewHeight = 240;
bool state = true;
CascadeClassifier haarCascade;
WebCamDevice[] devices;
// Use this for initialization
void Start()
{
m_material = Slice.GetComponent<MeshRenderer>().material;
rt = new Texture2D(mPreviewWidth, mPreviewHeight, TextureFormat.RGB565, false);
temp = new Texture2D(mPreviewWidth, mPreviewHeight, TextureFormat.RGB565, false);
StartCoroutine(Test());
haarCascade = new CascadeClassifier(Application.streamingAssetsPath + "/haarcascades/haarcascade_frontalface_alt2.xml");
_camera = Camera.main;
}
// Update is called once per frame
float timer;
void Update()
{
timer += Time.deltaTime;
if(cameraTexture!=null)
{
haarResult = DetectFace(haarCascade, GetTexture2D(cameraTexture));
bs = haarResult.ToBytes(".png");
rt.LoadImage(bs);
rt.Apply();
m_material.mainTexture = rt; //这里的面部跟随坐标计算是我根据分辨率自己算的(不精确),当然肯定有更好的算法实现。 m_Cube.transform.localPosition = Vector3.Slerp(m_Cube.transform.localPosition, new Vector3(center.X / 16, -center.Y / 21.8f, 0), 0.3f);
}
}
IEnumerator Test()
{
yield return Application.RequestUserAuthorization(UserAuthorization.WebCam);//调用外部摄像头
if (Application.HasUserAuthorization(UserAuthorization.WebCam))
{
devices = WebCamTexture.devices;
cameraName = devices[0].name;
cameraTexture = new WebCamTexture(cameraName, mPreviewWidth, mPreviewHeight, 30);
cameraTexture.Play();
isPlay = true;
}
}
Mat haarResult;
byte[] bs;
Mat result;
OpenCvSharp.Rect[] faces;
Mat src;
Mat gray = new Mat();
Size axes = new Size();
Point center = new Point();
private Mat DetectFace(CascadeClassifier cascade, Texture2D t)
{
src = Mat.FromImageData(t.EncodeToPNG(), ImreadModes.Color);
result = src.Clone();
Cv2.CvtColor(src, gray, ColorConversionCodes.BGR2GRAY);
src = null;
// Detect faces
faces = cascade.DetectMultiScale(gray, 1.08, 2, HaarDetectionType.ScaleImage, new Size(30, 30));
// Render all detected faces
for (int i = 0; i < faces.Length; i++)
{
center.X = (int)(faces[i].X + faces[i].Width * 0.5);
center.Y = (int)(faces[i].Y + faces[i].Height * 0.5);
axes.Width = (int)(faces[i].Width * 0.5);
axes.Height = (int)(faces[i].Height * 0.5);
//Cv2.Ellipse(result, center, axes, 0, 0, 360, new Scalar(255, 0, 255), 4);//绘制脸部范围
}
return result;
}
Texture2D temp;
Texture2D GetTexture2D(WebCamTexture wct)
{
temp.SetPixels(wct.GetPixels());
temp.Apply();
return temp;
}
}
unity演示工程地址 http://download.csdn.net/detail/truck_truck/9816238
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请联系我们举报,一经查实,本站将立刻删除。
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/139500.html原文链接:https://javaforall.net


