
大家好,又见面了,我是你们的朋友全栈君。
https://alibaba.github.io/arthas/
Arthas 是Alibaba开源的Java诊断工具,其安装应用非常简单,功能非常强大;
1.安装:推荐使用arthas-boot
下载arthas-boot.jar:
curl -O https://alibaba.github.io/arthas/arthas-boot.jar
java -jar arthas-boot.jar如果从github下载有问题,可以使用gitee镜像
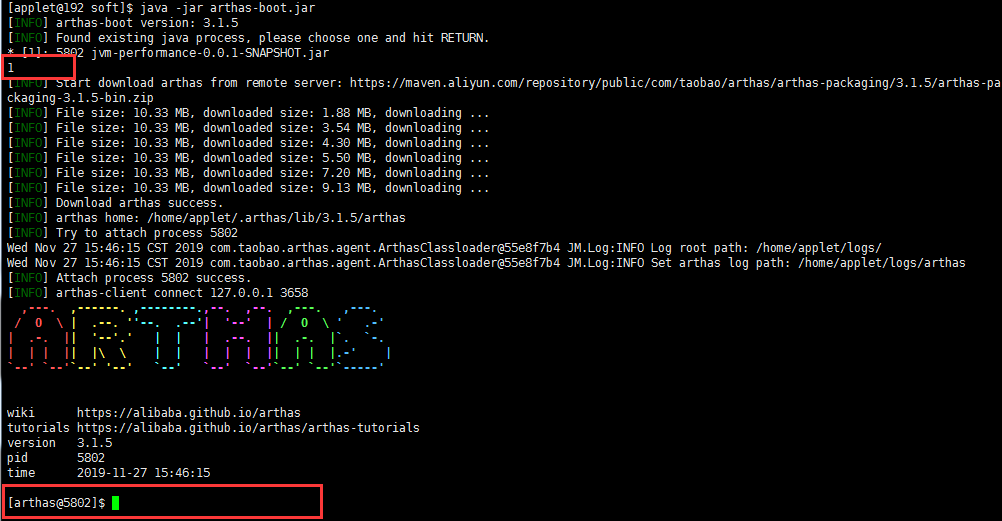
curl -O https://arthas.gitee.io/arthas-boot.jar2.运行:用java -jar的方式启动,启动arthas前需要启动应用(要有应用在运行) :


监测到有一个应用在运行;

3.监控应用:启动arthas并监测到运行的应用,如果有多个应用在运行,那么会出现列表,此处只有一个应用,输入1回车进入监控;
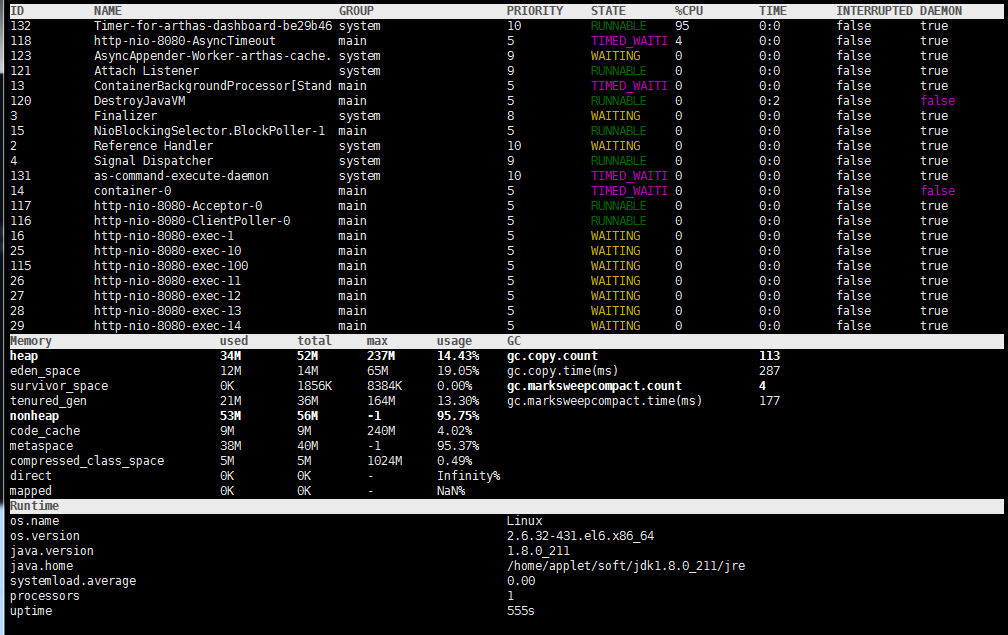
执行dashboard查看应用信息:退出使用:ctrl+c
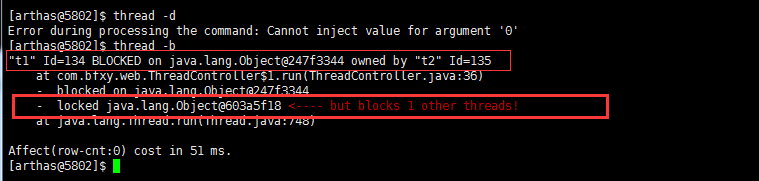
4.监测死锁(示例):https://blog.csdn.net/zxylwj/article/details/103271118 中的死锁需要手动定位,此处应用 thread -b可以直接定位死锁问题;
5.jad反编译:非常强大的功能,在实际工作中,经常出现类似场景,提交的代码未能完成预期功能,或是不确定是否正确提交到应用分支等等,可以使用jad命令进行生产中反编译 jad <class> 全路径;

6.应用场景案例:https://github.com/alibaba/arthas/issues?q=label%3Auser-case
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请联系我们举报,一经查实,本站将立刻删除。
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/139600.html原文链接:https://javaforall.net


