
大家好,又见面了,我是你们的朋友全栈君。
环境:UFT12,Win10,VS2015&VS2017
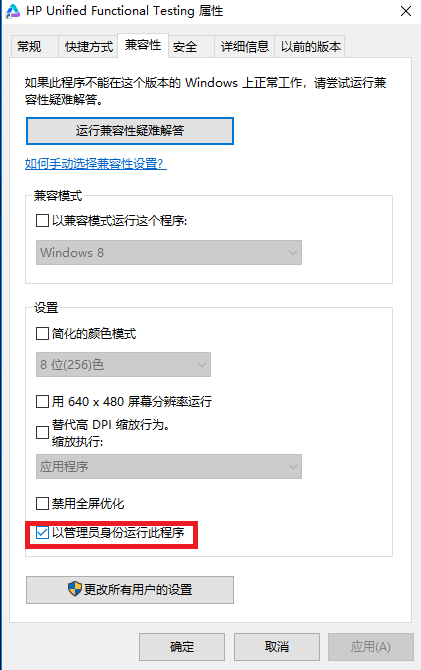
启动UFT12,为了启动方便修改快捷方式。

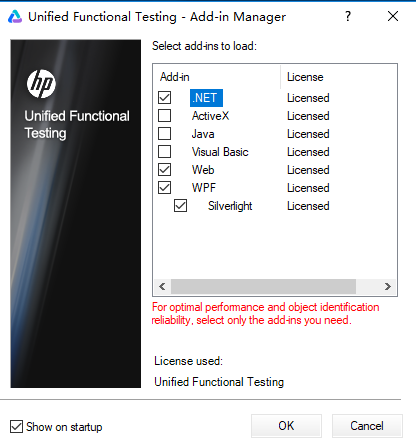
设置插件,WPF相关的都设置起来。
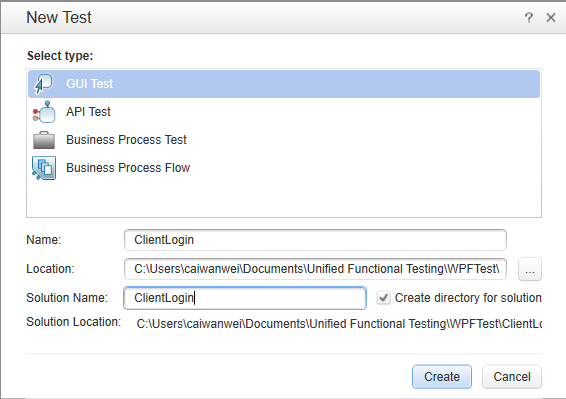
新建项目
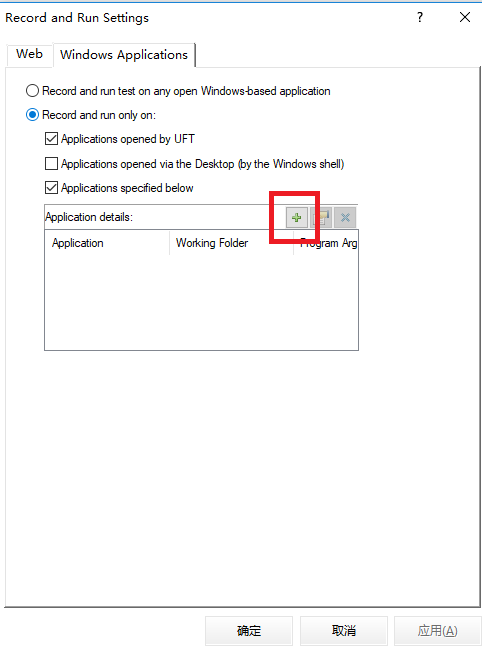
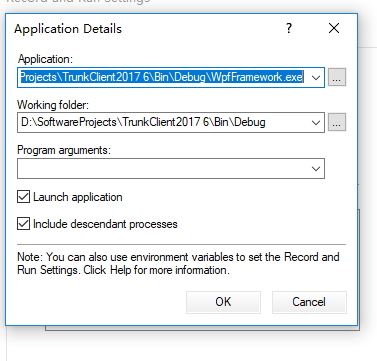
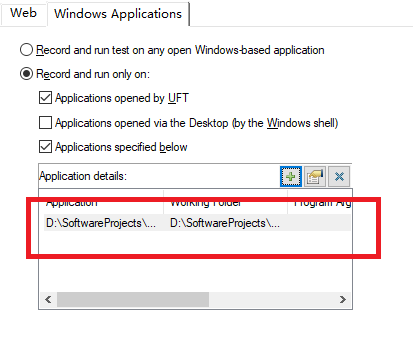
点击录制按钮(F6),设置启动程序。
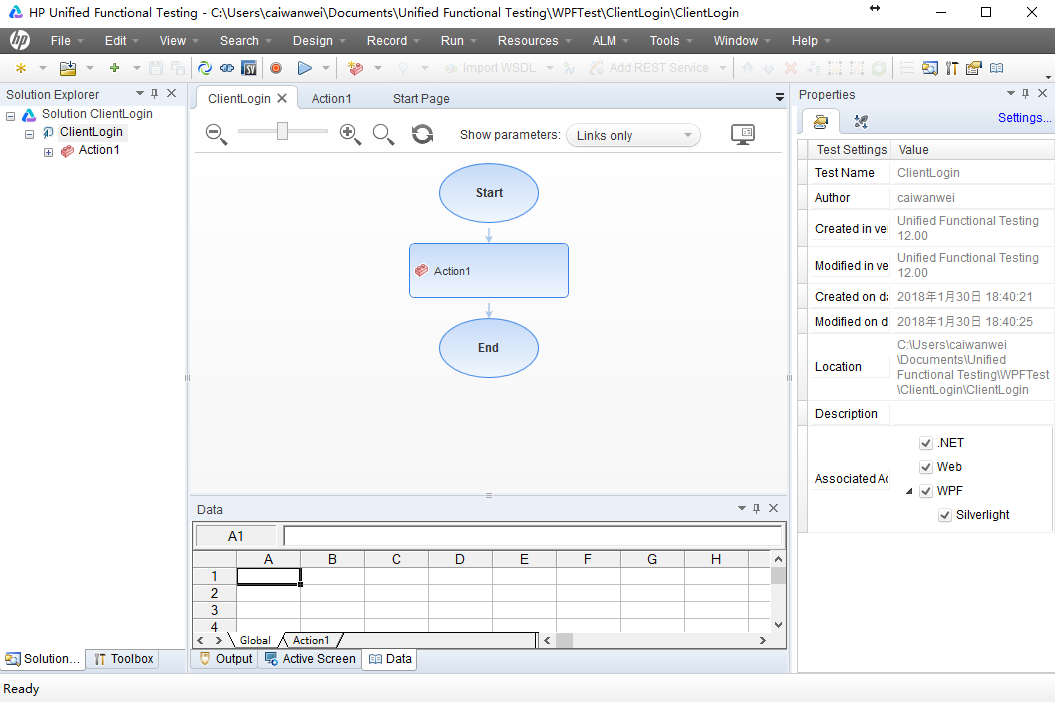
确定,开始录制。
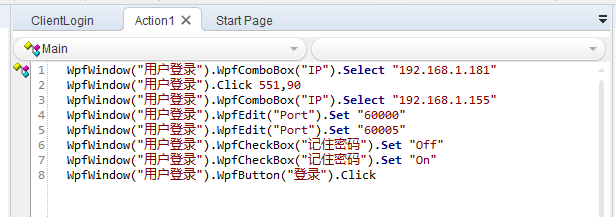
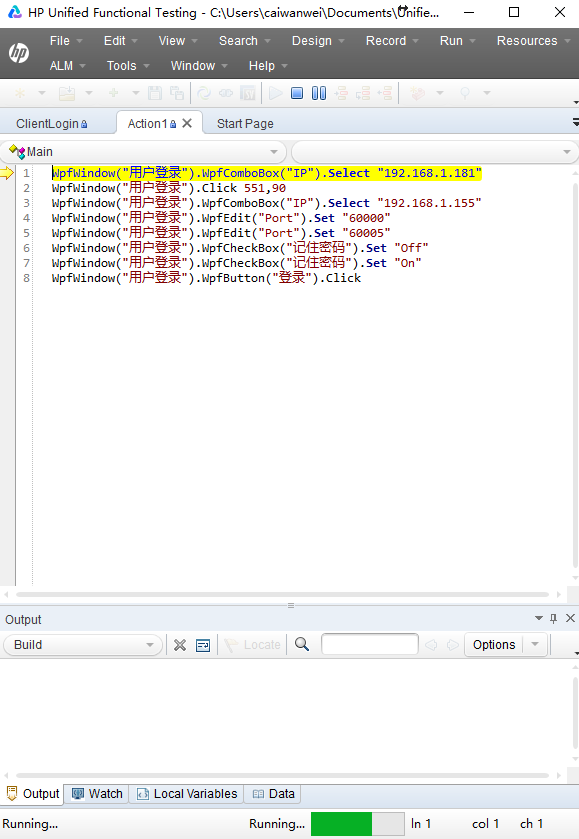
程序启动,显示登录界面。
操作:切换IP,点击按钮,登录。
点击工具栏按钮,停止录制。
点击运行按钮(F5)。
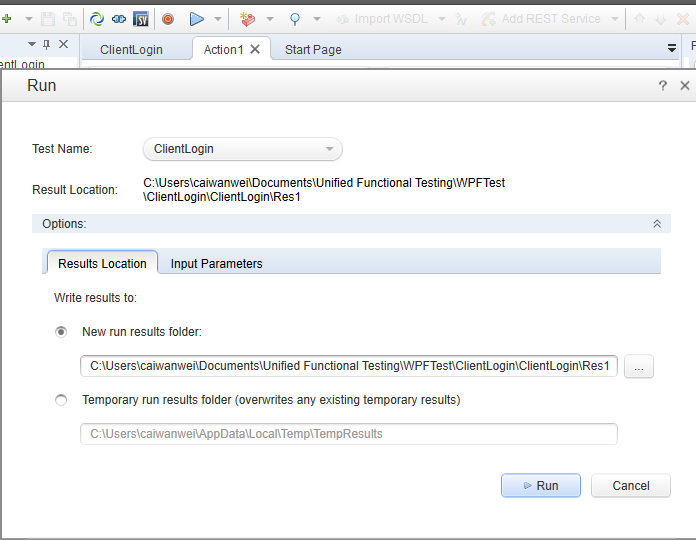
Run
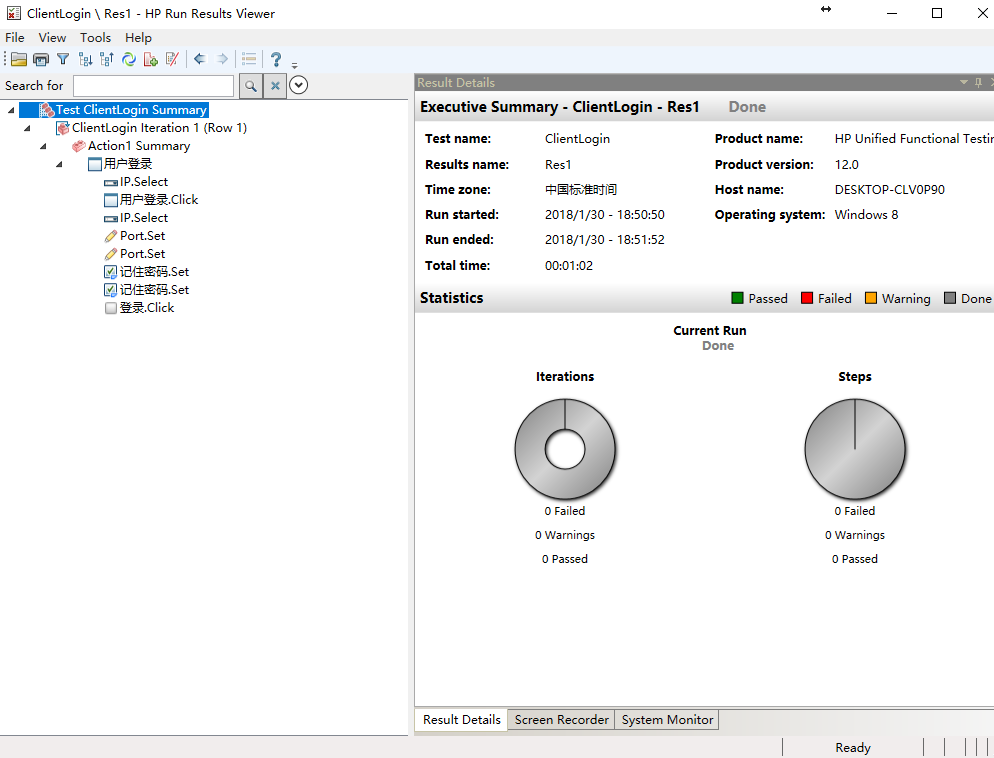
可以。
具体测试用例的编写以后有时间再研究。
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请联系我们举报,一经查实,本站将立刻删除。
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/140506.html原文链接:https://javaforall.net


