
大家好,又见面了,我是你们的朋友全栈君。
看前需知:作者本人使用的是四个普通的TT电机加编码器+增量式PID,适合PID初学者,但是需要对PID和增量式PID有一定的认知,本篇未有详细介绍,以代码应用为主,大佬勿喷。
文章目录
*云中何曾落羽,踏遍三岛寻声*
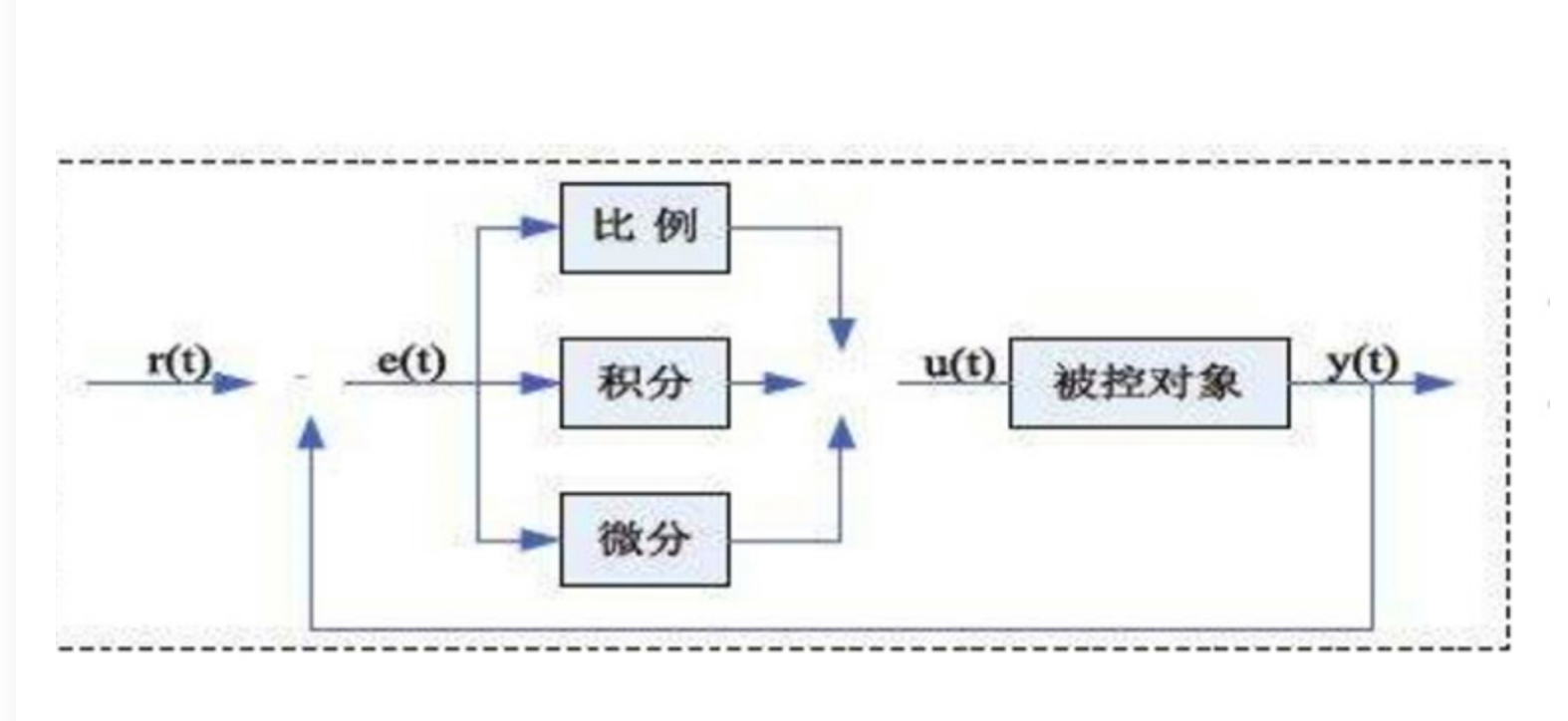
一、粗谈PID
PID在生活中很常见,举个例子。例如生活中,一个加热器需要对某个物体进行恒温控制,但是由于某种原因导致温度过高或者过低,这时候传感器会返回相应的数据,告诉控制器应当作出相应的调整,降温或者是加热,这就完成了一个简单的PID的闭环控制。PID就是修正公式里面的三个系数简称。
增量式PID控制将当前时刻的控制量和上一时刻的控制量做差,以差值为新的控制量,是一种递推式的算法。

二、使用的硬件设备
1、stm32f103rct6
2、某宝TT电机(小黄电机)+霍尔编码器
3、两块l2980驱动模块
4、四个18650电池供电
三、软件设计
1、四个电机分别使用IO口:PB8-PB9、PB10-PB11 、
PB12-PB13 、PB14-PB15。
2、PWM使用高级定时器TIM8的CH1-CH4,所用到的IO口:PC6 PC7 PC8 PC9。
3、四个编码器对应四个定时器TIM2 TIM3 TIM4 TIM5。开启自带的编码器模式,需同时开启对应的CH1和CH2。(对应的引脚可查看数据手册)
4、用TIM1进行中断计时。
注:TIM2需要完全重映射,因为未重映射时与TIM5的CH1,CH2引脚相同。 GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable , ENABLE); 这个禁用也不可忘了!
四、关键代码
1.TIM1定时器:
void Timer_Init(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE);
TIM_TimeBaseStructure.TIM_Period = 9999;//自动重新装载寄存器周期的值澹ㄥ计数值澹)
TIM_TimeBaseStructure.TIM_Prescaler = 719;//时钟分频系数
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;//对外部时钟进行采样的时钟分频
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;//向上计数
TIM_TimeBaseStructure.TIM_RepetitionCounter=0; //高级定时器1是用定时器功能配置这个才可以是正常的计数频率一开始的72mhz 值得注意的地方
TIM_TimeBaseInit(TIM1,&TIM_TimeBaseStructure);//参数初始化
TIM_ClearFlag(TIM1, TIM_FLAG_Update);
TIM_ITConfig(TIM1, TIM_IT_Update, ENABLE);
TIM_Cmd(TIM1, ENABLE);//启动定时器
}
2.TIM2编码器模式示例:
void Encoder_Init_TIM2(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_ICInitTypeDef TIM_ICInitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);//使能定时器2的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE);
GPIO_PinRemapConfig(GPIO_FullRemap_TIM2, ENABLE);
GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable , ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_15; //端口配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure); //根据设定参数初始化GPIOA
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3; //端口配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输入
GPIO_Init(GPIOB, &GPIO_InitStructure); //根据设定参数初始化GPIOA
TIM_TimeBaseStructInit(&TIM_TimeBaseStructure);
TIM_TimeBaseStructure.TIM_Prescaler = 0x0; // 预分频器
TIM_TimeBaseStructure.TIM_Period = ENCODER_TIM_PERIOD; //设定计数器自动重装值
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;//选择时钟分频:不分频
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;TIM向上计数
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);
TIM_EncoderInterfaceConfig(TIM2, TIM_EncoderMode_TI12, TIM_ICPolarity_Rising, TIM_ICPolarity_Rising);//使用编码器模式3
TIM_ICStructInit(&TIM_ICInitStructure);
TIM_ICInitStructure.TIM_ICFilter = 10;
TIM_ICInit(TIM2, &TIM_ICInitStructure);
TIM_ClearFlag(TIM2, TIM_FLAG_Update);//清除TIM的更新标志位
TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE);
//Reset counter
TIM_SetCounter(TIM2,0);
TIM_Cmd(TIM2, ENABLE);
}
3.电机初始化:
void dj1_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //使能PB端口时钟
GPIO_InitStructure.GPIO_Pin =GPIO_Pin_11|GPIO_Pin_10|GPIO_Pin_9|GPIO_Pin_8;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度为50MHz
GPIO_Init(GPIOB, &GPIO_InitStructure); //根据设定参数初始化GPIOB
}
4.TIM8PWM输出:
void PWM_Init(u16 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM8, ENABLE);//
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC , ENABLE); //使能GPIO外设时钟使能
// GPIO_PinRemapConfig(GPIO_FullRemap_TIM3, ENABLE); //全映射 PC6-9
//设置该引脚为复用输出功能,输出TIM8 CH1的PWM脉冲波形
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7|GPIO_Pin_8|GPIO_Pin_9; //TIM_CH1
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOC, &GPIO_InitStructure);
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值 不分频
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM8, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //选择定时器模式:TIM脉冲宽度调制模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_Pulse = 0; //设置待装入捕获比较寄存器的脉冲值
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
TIM_OCInitStructure.TIM_OCIdleState = TIM_OCIdleState_Reset ;
TIM_OCInitStructure.TIM_OutputNState = TIM_OutputNState_Disable;
//TIM_OCInitStructure.TIM_OCNIdleState = TIM_OCNIdleState_Reset;
TIM_OC1Init(TIM8, &TIM_OCInitStructure); //根据TIM_OCInitStruct中指定的参数初始化外设TIMx
TIM_OC2Init(TIM8, &TIM_OCInitStructure);
TIM_OC3Init(TIM8, &TIM_OCInitStructure);
TIM_OC4Init(TIM8, &TIM_OCInitStructure);
TIM_CtrlPWMOutputs(TIM8,ENABLE); //MOE 主输出使能
TIM_OC1PreloadConfig(TIM8, TIM_OCPreload_Enable); //CH1预装载使能
TIM_OC2PreloadConfig(TIM8, TIM_OCPreload_Enable);
TIM_OC3PreloadConfig(TIM8, TIM_OCPreload_Enable);
TIM_OC4PreloadConfig(TIM8, TIM_OCPreload_Enable);
TIM_ARRPreloadConfig(TIM8, ENABLE); //使能TIMx在ARR上的预装载寄存器
TIM_Cmd(TIM8, ENABLE); //使能TIM8
}
5.PID:
static double Proportion=0.45; //比例常数 Proportional Const
static double Integral=0.1; //积分常数 Integral Const
static double Derivative=0; //b不采用微分
/********************增量式PID控制设计************************************/
//NowPoint当前输出值
//SetPoint设定值
int PID_Calc1(int NowPoint,int SetPoint)
{
//微分常数 Derivative Const
static int LastError1; //Error[-1]
static int PrevError1; //Error[-2]
int iError,Outpid; //当前误差
iError=SetPoint-NowPoint; //增量计算
Outpid=(Proportion * iError) //E[k]项
-(Integral * LastError1) //E[k-1]项
+(Derivative * PrevError1); //E[k-2]项
PrevError1=LastError1; //存储误差,用于下次计算
LastError1=iError;
return(Outpid); //返回增量值
}
int PID_Calc2(int NowPoint,int SetPoint)
{
//微分常数 Derivative Const
static int LastError2; //Error[-1]
static int PrevError2; //Error[-2]
int iError,Outpid; //当前误差
iError=SetPoint-NowPoint; //增量计算
Outpid=(Proportion * iError) //E[k]项
-(Integral * LastError2) //E[k-1]项
+(Derivative * PrevError2); //E[k-2]项
PrevError2=LastError2; //存储误差,用于下次计算
LastError2=iError;
return(Outpid); //返回增量值
}
int PID_Calc3(int NowPoint,int SetPoint)
{
//微分常数 Derivative Const
static int LastError3; //Error[-1]
static int PrevError3; //Error[-2]
int iError,Outpid; //当前误差
iError=SetPoint-NowPoint; //增量计算
Outpid=(Proportion * iError) //E[k]项
-(Integral * LastError3) //E[k-1]项
+(Derivative * PrevError3); //E[k-2]项
PrevError3=LastError3; //存储误差,用于下次计算
LastError3=iError;
return(Outpid); //返回增量值
}
int PID_Calc4(int NowPoint,int SetPoint)
{
//微分常数 Derivative Const
static int LastError4; //Error[-1]
static int PrevError4; //Error[-2]
int iError,Outpid; //当前误差
iError=SetPoint-NowPoint; //增量计算
Outpid=(Proportion * iError) //E[k]项
-(Integral * LastError4) //E[k-1]项
+(Derivative * PrevError4); //E[k-2]项
PrevError4=LastError4; //存储误差,用于下次计算
LastError4=iError;
return(Outpid); //返回增量值
}
6.中断服务函数:
void dj1_Init(void)
{
int Encoder_Front_Left,Encoder_Front_Right,Encoder_Back_Right,Encoder_Back_Left;
int Left_t,Right_t,Encoder_R,Encoder_L;
int Moto_Front_Left,Moto_Front_Right,Moto_Back_Left,Moto_Back_Right;
int para1,para2,para3,para4;//增量
int SetPoint1=30;//设置目标值单位RPM
int SetPoint2=30;
//使用减速比是1:120的减速箱
#define SetPoint_back SetPoint1*6240/600//换算成编码器速度,因为最终pid控制的是编码器的脉冲数量
#define SetPoint_front SetPoint2*6240/600//换算成编码器速度,因为最终pid控制的是编码器的脉冲数量
//Time1定时器1中断服务函数
//200ms定时
void TIM1_UP_IRQHandler(void)
{
if(TIM_GetFlagStatus(TIM1, TIM_IT_Update) != RESET) //时间到了
{
TIM_ClearITPendingBit(TIM1, TIM_FLAG_Update);//清中断
Encoder_Front_Left=myabs(Read_Encoder(2)); //读取编码器
Encoder_Front_Right=myabs(Read_Encoder(3));
Encoder_Back_Left=myabs(Read_Encoder(4));
Encoder_Back_Right=myabs(Read_Encoder(5));
para1=PID_Calc1(Encoder_Front_Left,SetPoint_back); //左电机,计数得到增量式PID的增量数值
para2=PID_Calc2(Encoder_Front_Right,SetPoint_back);
para3=PID_Calc3(Encoder_Back_Left,SetPoint_front);
para4=PID_Calc4(Encoder_Back_Right,SetPoint_front);
if((para1<-3)||(para1>3)) // 不做 PID 调整,避免误差较小时频繁调节引起震荡。
{
Moto_Front_Left +=para1;
}
if(Moto_Front_Left>3500) Moto_Front_Left=3500;//限幅
TIM8->CCR1=Moto_Front_Left;//更新pwm
if((para2<-3)||(para2>3)) // 不做 PID 调整,避免误差较小时频繁调节引起震荡。
{
Moto_Front_Right +=para2;
}
if(Moto_Front_Right>3500) Moto_Front_Right=3500;//限幅
TIM8->CCR2=Moto_Front_Right;
///
if((para3<-3)||(para3>3)) // 不做 PID 调整,避免误差较小时频繁调节引起震荡。
{
Moto_Back_Left +=para3;
}
if(Moto_Back_Left>3500) Moto_Back_Left=3500;//限幅
TIM8->CCR3=Moto_Back_Left;//更新pwm
if((para4<-3)||(para4>3)) // 不做 PID 调整,避免误差较小时频繁调节引起震荡。
{
Moto_Back_Right +=para4;
}
if(Moto_Back_Right>3500) Moto_Back_Right=3500;//限幅
TIM8->CCR4=Moto_Back_Right;//更新pwm
delay_ms(2);
}
}
int myabs(int a)
{
int temp;
if(a<0)
temp=-a;
else
temp=a;
return temp;
}
总结
由于本人为新手,代码可能显得冗长,本文关于速度的计算设置就不写了,可以结合其他大佬博主的文章尝试理解,需要代码的可以评论区留言+一键三连(嘿嘿嘿)。书写不易,感谢支持,大家一起进步!
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/140759.html原文链接:https://javaforall.net


