
大家好,又见面了,我是你们的朋友全栈君。
前言
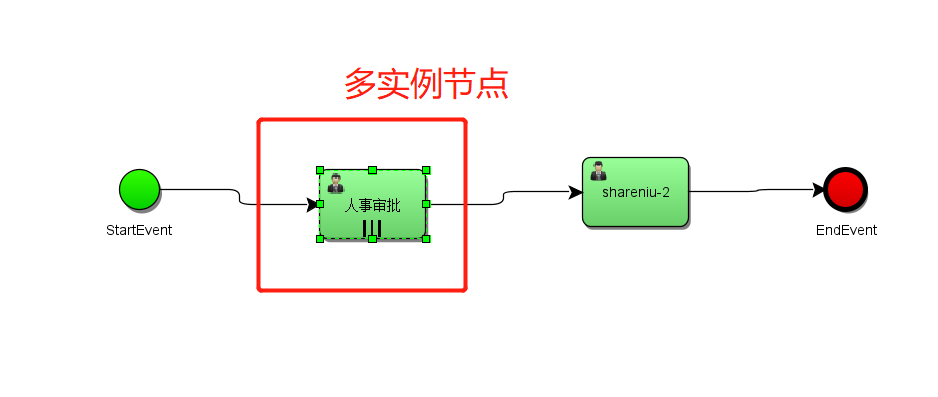
上一篇我们简单演示了单实例节点跳转的过程,在实际业务场景中,多实例节点的跳转也是一种常见的跳转场景,举例来说,当前的节点配置的是会签,即多个实例任务的节点,需要从当前节点跳出去该怎么办呢?或者说从某一个单实例节点再跳入到多实例节点,又该如何实现呢?activity对于这样的场景也提供了解决方案
问题解决思路
想必还记得我们在之前的篇章中谈到的那个流程实例跳转过程中的3级实例树吧?以多实例节点跳出为例
- 需要的参数,任务ID、目标节点
- 判断当前的节点是否是多实例任务节点
- 获取二级执行实例信息
- 删除二级实例下面的所有三级实例节点
- 将二级执行实例是否是多实例根节点字段只为false。因为跳出去之后,二级实例是常规的数据
- 更新二级执行实例数据
- 触发二级执行实例开始运转
下面开始我们的演示过程
1、部署并启动流程定义文件

//部署
public static void main(String[] args) {
ProcessEngine processEngine = ProcessEngines.getDefaultProcessEngine();
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请联系我们举报,一经查实,本站将立刻删除。
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/143375.html原文链接:https://javaforall.net


