
大家好,又见面了,我是你们的朋友全栈君。
ADRC
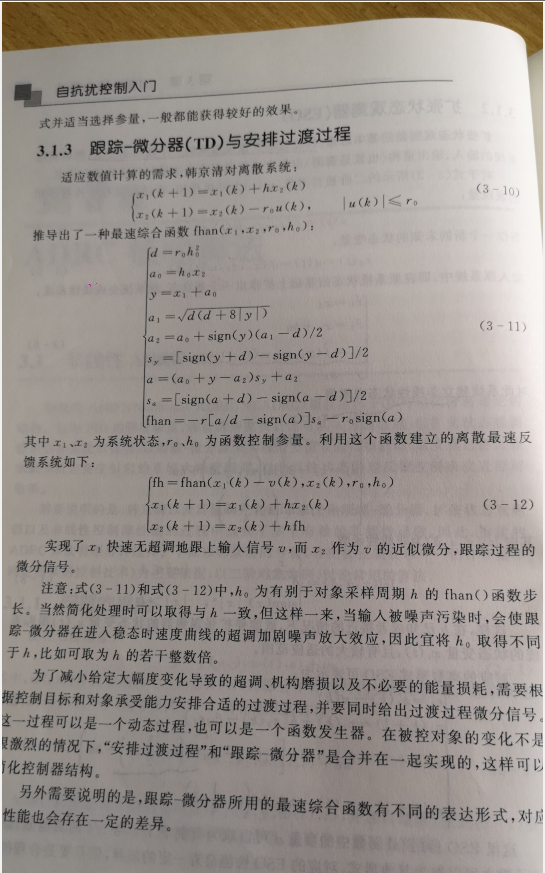
优化fhan
《自抗扰控制入门》
自抗扰死忠粉

ADRC.H
#ifndef _ADRC_H_
#define _ADRC_H_
typedef struct
{
/*****安排过度过程*******/
float x1;//跟踪微分期状态量
float x2;//跟踪微分期状态量微分项
float r;//时间尺度
float h;//ADRC系统积分时间
uint16 N0;//跟踪微分器解决速度超调h0=N*h
float h0;
float fh;//最速微分加速度跟踪量
float fst;//最速微分加速度跟踪量
/*****扩张状态观测器*******/
/******已系统输出y和输入u来跟踪估计系统状态和扰动*****/
float z1;
float z2;
float z3;//根据控制对象输入与输出,提取的扰动信息
float e;//系统状态误差
float y;//系统输出量
float fe;
float fe1;
float beta_01;
float beta_02;
float beta_03;
float b;
/**********系统状态误差反馈率*********/
float e0;//状态误差积分项
float e1;//状态偏差
float e2;//状态量微分项
float u0;//非线性组合系统输出
float u;//带扰动补偿后的输出
float b0;//扰动补偿
/*********第一种组合形式*********/
float beta_0;//线性
float beta_1;//非线性组合参数
float beta_2;//u0=beta_1*e1+beta_2*e2+(beta_0*e0);
/*********第二种组合形式*********/
float alpha1;//u0=beta_1*fal(e1,alpha1,zeta)+beta_2*fal(e2,alpha2,zeta)
float alpha2;//0<alpha1<1<alpha2
float zeta;//线性段的区间长度
/*********第三种组合形式*********/
float h1;//u0=-fhan(e1,e2,r,h1);
uint16 N1;//跟踪微分器解决速度超调h0=N*h
/*********第四种组合形式*********/
float c;//u0=-fhan(e1,c*e2*e2,r,h1);
}Fhan_Data;
void ADRC_Init(Fhan_Data *fhan_Input1,Fhan_Data *fhan_Input2);
void Fhan_ADRC(Fhan_Data *fhan_Input,float expect_ADRC);
void ADRC_Control(Fhan_Data *fhan_Input,float expect_ADRC,float feedback);
extern Fhan_Data ADRC_Pitch_Controller,ADRC_Roll_Controller;
#endif
ADRC.C
//#include "Headfile.h"
#include "ADRC.h"
Fhan_Data ADRC_Pitch_Controller;
Fhan_Data ADRC_Roll_Controller;
const float ADRC_Unit[3][16]=
{
/*TD跟踪微分器 改进最速TD,h0=N*h 扩张状态观测器ESO 扰动补偿 非线性组合*/
/* r h N beta_01 beta_02 beta_03 b0 beta_0 beta_1 beta_2 N1 C alpha1 alpha2 zeta b*/
{
300000 ,0.005 , 3, 300, 4000, 10000, 0.001, 0.002, 2.0, 0.0010, 5, 5, 0.8, 1.5, 50, 0},
{
300000 ,0.005 , 3, 300, 4000, 10000, 0.001, 0.002, 2.0, 0.0010, 5, 5, 0.8, 1.5, 50, 0},
{
300000 ,0.005 , 3, 300, 4000, 10000, 0.001, 0.002, 1.2, 0.0005, 5, 5, 0.8, 1.5, 50, 0},
};
float Constrain_Float(float amt, float low, float high){
return ((amt)<(low)?(low):((amt)>(high)?(high):(amt)));
}
int16_t Sign_ADRC(float Input)
{
int16_t output=0;
if(Input>1E-6) output=1;
else if(Input<-1E-6) output=-1;
else output=0;
return output;
}
int16_t Fsg_ADRC(float x,float d)
{
int16_t output=0;
output=(Sign_ADRC(x+d)-Sign_ADRC(x-d))/2;
return output;
}
void ADRC_Init(Fhan_Data *fhan_Input1,Fhan_Data *fhan_Input2)
{
fhan_Input1->r=ADRC_Unit[0][0];
fhan_Input1->h=ADRC_Unit[0][1];
fhan_Input1->N0=(uint16)(ADRC_Unit[0][2]);
fhan_Input1->beta_01=ADRC_Unit[0][3];
fhan_Input1->beta_02=ADRC_Unit[0][4];
fhan_Input1->beta_03=ADRC_Unit[0][5];
fhan_Input1->b0=ADRC_Unit[0][6];
fhan_Input1->beta_0=ADRC_Unit[0][7];
fhan_Input1->beta_1=ADRC_Unit[0][8];
fhan_Input1->beta_2=ADRC_Unit[0][9];
fhan_Input1->N1=(uint16)(ADRC_Unit[0][10]);
fhan_Input1->c=ADRC_Unit[0][11];
fhan_Input1->alpha1=ADRC_Unit[0][12];
fhan_Input1->alpha2=ADRC_Unit[0][13];
fhan_Input1->zeta=ADRC_Unit[0][14];
fhan_Input1->b=ADRC_Unit[0][15];
fhan_Input2->r=ADRC_Unit[1][0];
fhan_Input2->h=ADRC_Unit[1][1];
fhan_Input2->N0=(uint16)(ADRC_Unit[1][2]);
fhan_Input2->beta_01=ADRC_Unit[1][3];
fhan_Input2->beta_02=ADRC_Unit[1][4];
fhan_Input2->beta_03=ADRC_Unit[1][5];
fhan_Input2->b0=ADRC_Unit[1][6];
fhan_Input2->beta_0=ADRC_Unit[1][7];
fhan_Input2->beta_1=ADRC_Unit[1][8];
fhan_Input2->beta_2=ADRC_Unit[1][9];
fhan_Input2->N1=(uint16)(ADRC_Unit[1][10]);
fhan_Input2->c=ADRC_Unit[1][11];
fhan_Input2->alpha1=ADRC_Unit[1][12];
fhan_Input2->alpha2=ADRC_Unit[1][13];
fhan_Input2->zeta=ADRC_Unit[1][14];
fhan_Input2->b=ADRC_Unit[1][15];
}
//ADRC最速跟踪微分器TD,改进的算法fhan
void Fhan_ADRC(Fhan_Data *fhan_Input,float expect_ADRC)//安排ADRC过度过程
{
float d=0,a0=0,y=0,a1=0,a2=0,a=0;
float x1_delta=0;//ADRC状态跟踪误差项
x1_delta=fhan_Input->x1-expect_ADRC;//用x1-v(k)替代x1得到离散更新公式
fhan_Input->h0=fhan_Input->N0*fhan_Input->h;//用h0替代h,解决最速跟踪微分器速度超调问题
d=fhan_Input->r*fhan_Input->h0*fhan_Input->h0;//d=rh^2;
a0=fhan_Input->h0*fhan_Input->x2;//a0=h*x2
y=x1_delta+a0;//y=x1+a0
a1=sqrt(d*(d+8*ABS(y)));//a1=sqrt(d*(d+8*ABS(y))])
a2=a0+Sign_ADRC(y)*(a1-d)/2;//a2=a0+sign(y)*(a1-d)/2;
a=(a0+y)*Fsg_ADRC(y,d)+a2*(1-Fsg_ADRC(y,d));
fhan_Input->fh=-fhan_Input->r*(a/d)*Fsg_ADRC(a,d)
-fhan_Input->r*Sign_ADRC(a)*(1-Fsg_ADRC(a,d));//得到最速微分加速度跟踪量
fhan_Input->x1+=fhan_Input->h*fhan_Input->x2;//跟新最速跟踪状态量x1
fhan_Input->x2+=fhan_Input->h*fhan_Input->fh;//跟新最速跟踪状态量微分x2
}
//原点附近有连线性段的连续幂次函数
float Fal_ADRC(float e,float alpha,float zeta)
{
int16 s=0;
float fal_output=0;
s=(Sign_ADRC(e+zeta)-Sign_ADRC(e-zeta))/2;
fal_output=e*s/(powf(zeta,1-alpha))+powf(ABS(e),alpha)*Sign_ADRC(e)*(1-s);
return fal_output;
}
/************扩张状态观测器********************/
//状态观测器参数beta01=1/h beta02=1/(3*h^2) beta03=2/(8^2*h^3) ...
void ESO_ADRC(Fhan_Data *fhan_Input)
{
fhan_Input->e=fhan_Input->z1-fhan_Input->y;//状态误差
fhan_Input->fe=Fal_ADRC(fhan_Input->e,0.5,fhan_Input->h);//非线性函数,提取跟踪状态与当前状态误差
fhan_Input->fe1=Fal_ADRC(fhan_Input->e,0.25,fhan_Input->h);
/*************扩展状态量更新**********/
fhan_Input->z1+=fhan_Input->h*(fhan_Input->z2-fhan_Input->beta_01*fhan_Input->e);
fhan_Input->z2+=fhan_Input->h*(fhan_Input->z3
-fhan_Input->beta_02*fhan_Input->fe
+fhan_Input->b*fhan_Input->u);
//ESO估计状态加速度信号,进行扰动补偿,传统MEMS陀螺仪漂移较大,估计会产生漂移
fhan_Input->z3+=fhan_Input->h*(-fhan_Input->beta_03*fhan_Input->fe1);
}
void Nolinear_Conbination_ADRC(Fhan_Data *fhan_Input)
{
float temp_e2=0;
temp_e2=Constrain_Float(fhan_Input->e2,-3000,3000);
fhan_Input->u0=fhan_Input->beta_1*Fal_ADRC(fhan_Input->e1,fhan_Input->alpha1,fhan_Input->zeta)
+fhan_Input->beta_2*Fal_ADRC(temp_e2,fhan_Input->alpha2,fhan_Input->zeta);
}
void ADRC_Control(Fhan_Data *fhan_Input,float expect_ADRC,float feedback_ADRC)
{
/*自抗扰控制器第1步*/
/******** ** ** ** ** ** ********/
/***** 安排过度过程,输入为期望给定, 由TD跟踪微分器得到: 过度期望信号x1,过度期望微分信号x2 ******/
Fhan_ADRC(fhan_Input,expect_ADRC);
/*自抗扰控制器第2步*/
/******** * * **** * * ********/
/************系统输出值为反馈量,状态反馈,ESO扩张状态观测器的输入*********/
fhan_Input->y=feedback_ADRC;
/***** 扩张状态观测器,得到反馈信号的扩张状态: 1、状态信号z1; 2、状态速度信号z2; 3、状态加速度信号z3。 其中z1、z2用于作为状态反馈与TD微分跟踪器得到的x1,x2做差后, 经过非线性函数映射,乘以beta系数后, 组合得到未加入状态加速度估计扰动补偿的原始控制量u *********/
ESO_ADRC(fhan_Input);//低成本MEMS会产生漂移,扩展出来的z3此项会漂移,目前暂时未想到办法解决,未用到z3
/*自抗扰控制器第3步*/
/******** ** ** ** ** ** ********/
/********状态误差反馈率***/
fhan_Input->e0+=fhan_Input->e1*fhan_Input->h;//状态积分项
fhan_Input->e1=fhan_Input->x1-fhan_Input->z1;//状态偏差项
fhan_Input->e2=fhan_Input->x2-fhan_Input->z2;//状态微分项,
/********线性组合*******/
/* fhan_Input->u0=//fhan_Input->beta_0*fhan_Input->e0 +fhan_Input->beta_1*fhan_Input->e1 +fhan_Input->beta_2*fhan_Input->e2; */
Nolinear_Conbination_ADRC(fhan_Input);
/**********扰动补偿*******/
//fhan_Input->u=fhan_Input->u0
// -fhan_Input->z3/fhan_Input->b0;
//由于MEMS传感器漂移比较严重,当beta_03取值比较大时,长时间z3漂移比较大,目前不加入扰动补偿控制量
fhan_Input->u=Constrain_Float(fhan_Input->u0,-200,200);
}
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请联系我们举报,一经查实,本站将立刻删除。
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/144311.html原文链接:https://javaforall.net


