
大家好,又见面了,我是你们的朋友全栈君。
当今的闭环自动控制技术都是基于反馈的概念以减少不确定性。反馈理论的要素包括三个部分:测量、比较和执行。测量关键的是被控变量的实际值,与期望值相比较,用这个偏差来纠正系统的响应,执行调节控制。在工程实际中,应用最为广泛的调节器控制规律为比例、积分、微分控制,简称PID控制,又称PID调节。
一、 PID含义
PID是英文单词比例(Proportion),积分(Integral),微分(Differential coefficient)的缩写。PID调节实际上是由比例、积分、微分三种调节方式组成,它们各自的作用如下:
比例调节作用:是按比例反应系统的偏差,系统一旦出现了偏差,比例调节立即产生调节作用用以减少偏差。比例作用大,可以加快调节,减少误差,但是过大的比例,使系统的稳定性下降,甚至造成系统的不稳定。
积分调节作用:是使系统消除稳态误差,提高无差度。因为有误差,积分调节就进行,直至无差,积分调节停止,积分调节输出一常值。积分作用的强弱取决与积分时间常数Ti,Ti越小,积分作用就越强。反之Ti大则积分作用弱,加入积分调节可使系统稳定性下降,动态响应变慢。积分作用常与另两种调节规律结合,组成PI调节器或PID调节器。
微分调节作用:微分作用反映系统偏差信号的变化率,具有预见性,能预见偏差变化的趋势,因此能产生超前的控制作用,在偏差还没有形成之前,已被微分调节作用消除。因此,可以改善系统的动态性能。在微分时间选择合适情况下,可以减少超调,减少调节时间。微分作用对噪声干扰有放大作用,因此过强的加微分调节,对系统抗干扰不利。此外,微分反应的是变化率,而当输入没有变化时,微分作用输出为零。微分作用不能单独使用,需要与另外两种调节规律相结合,组成PD或PID控制器
二、公式
PID控制算法在实际应用中又可分为两种:位置式PID控制算法和增量式PID控制算法。控制理论上两者是相同的,但在数字量化后的实现上会存在差别。
2.1 位置式数字 PID 控制
k 采样时刻的离散 PID 表达式:


上式中,Ki=Kp/Ti,Kd=Kp*Td,T 为采样周期,k 为采样序号,k=1,2,…,e(k-1)和e(k)分别为第(k-1)和第 k 时刻所得到的系统偏差信号。
2.2增量式 PID 控制
增量式 PID 控制是指控制器的输出是控制量的增量Δu(k),当执行机构需要的是控制量的增量而不是位置量的绝对数值时,可以使用增量式 PID 控制算法进行控制。

式中,Ki=Kp/Ti,Kd=Kp*Td,T 为采样周期,k 为采样序号,k=1,2,…,e(k-2)、e(k-1)以及 e(k)分别为第(k-2)、第(k-1)和第 k 时刻所得到的系统偏差信号。
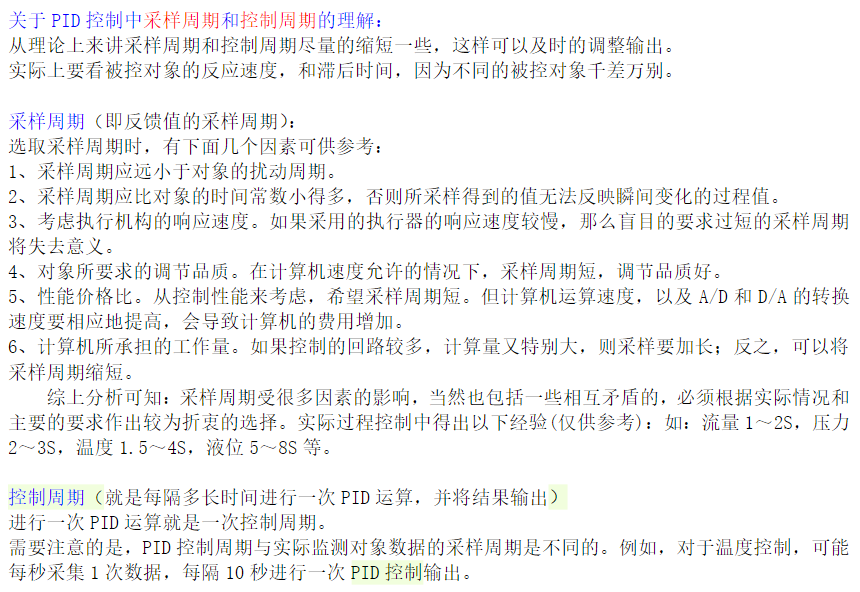
三、采样周期和控制周期
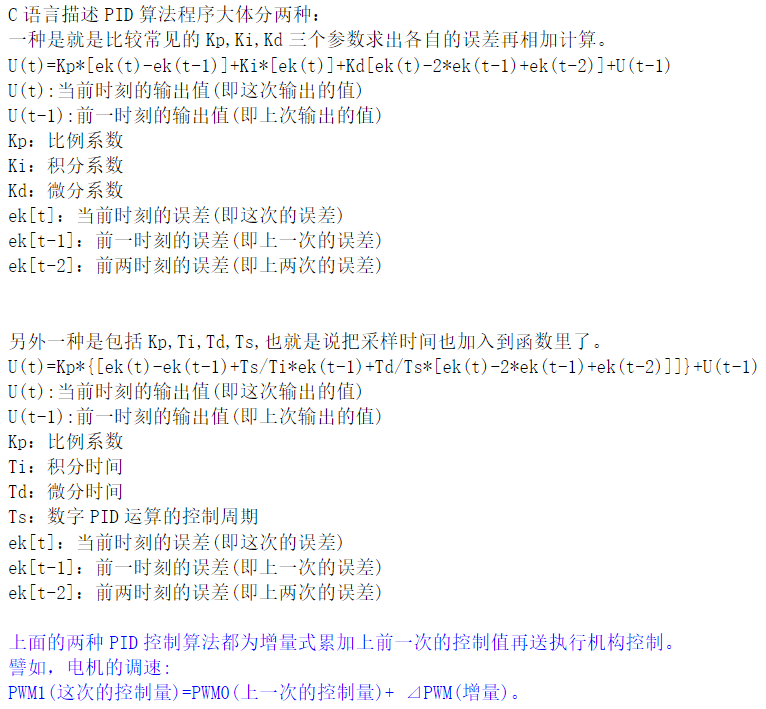
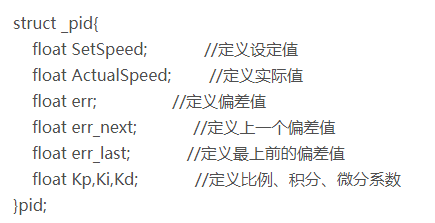
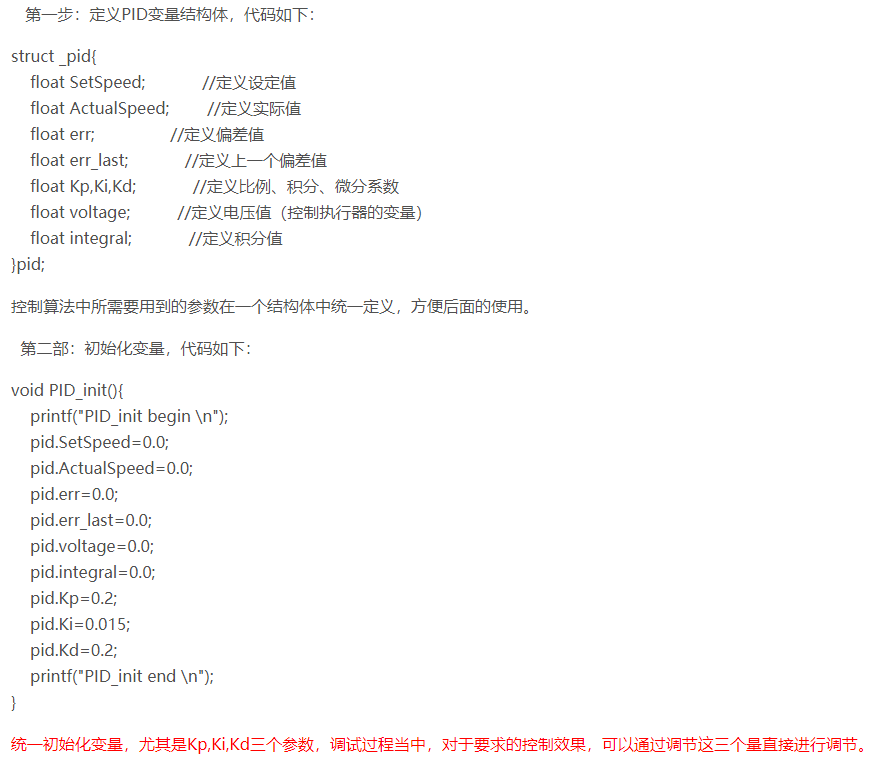
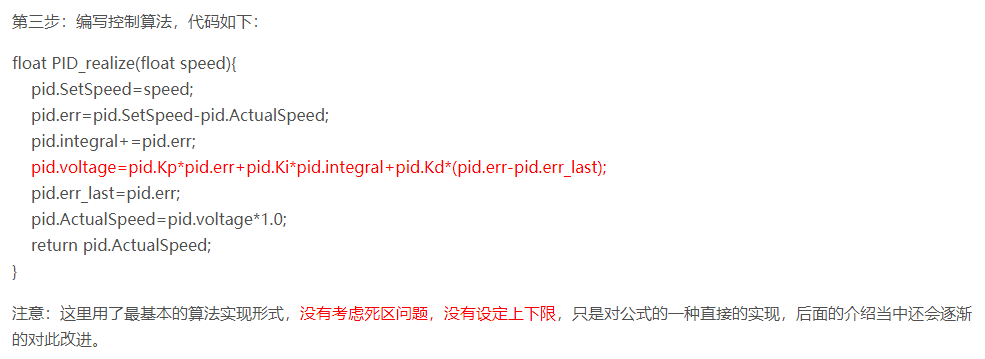
四、C语言描述PID算法程序
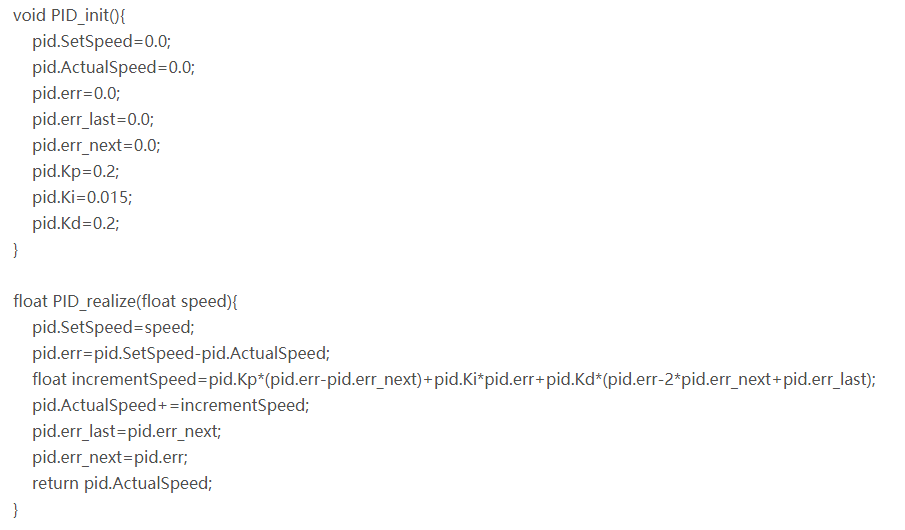
4.1增量型PID的C语言实现
4.2 位置型PID的C语言实现
五、PID调试
由于自动控制系统被控对象的千差万别,PID的参数也必须随之变化,以满足系统的性能要求。这就给使用者带来相当的麻烦,特别是对初学者。下面简单介绍一下调试PID参数的一般步骤:
5.1负反馈
自动控制理论也被称为负反馈控制理论。首先检查系统接线,确定系统的反馈为负反馈。例如电机调速系统,输入信号为正,要求电机正转时,反馈信号也为正(PID算法时,误差=输入-反馈),同时电机转速越高,反馈信号越大。其余系统同此方法。
5.2.PID调试一般原则
a.在输出不振荡时,增大比例增益P。
b.在输出不振荡时,减小积分时间常数Ti。
c.在输出不振荡时,增大微分时间常数Td。
5.3.位置式PID调节
a.确定比例增益P
确定比例增益P 时,首先去掉PID的积分项和微分项,一般是令Ti=0、Td=0(具体见PID的参数设定说明),使PID为纯比例调节。输入设定为系统允许的最大值的60%~70%,由0逐渐加大比例增益P,直至系统出现振荡;再反过来,从此时的比例增益P逐渐减小,直至系统振荡消失,记录此时的比例增益P,设定PID的比例增益P为当前值的60%~70%。比例增益P调试完成。
b.确定积分时间常数Ti
比例增益P确定后,设定一个较大的积分时间常数Ti的初值,然后逐渐减小Ti,直至系统出现振荡,之后在反过来,逐渐加大Ti,直至系统振荡消失。记录此时的Ti,设定PID的积分时间常数Ti为当前值的150%~180%。积分时间常数Ti调试完成。
c.确定微分时间常数Td
积分时间常数Td一般不用设定,为0即可。若要设定,与确定 P和Ti的方法相同,取不振荡时的30%。
d.系统空载、带载联调,再对PID参数进行微调,直至满足要求。
5.4 增量式pid调节
增量式pid调节目标速度时候参数整定:
先加大KI,这时候会越来越接近实际速度,当KI过大的时候,在切换目标速度的时候,就会抖动,这时候就是KI大了响应速度高了,但导致超调量增加,这时候就加大增量式的KP,来缓减抖动,减小超调量。
(注:网上大多资料都是错的,把增量式跟位置式混为一谈)
六、PID常用口诀
参数整定找最佳,从小到大顺序查
先是比例后积分,最后再把微分加
曲线振荡很频繁,比例度盘要放大
曲线漂浮绕大湾,比例度盘往小扳
曲线偏离回复慢,积分时间往下降
曲线波动周期长,积分时间再加长
曲线振荡频率快,先把微分降下来
动差大来波动慢。微分时间应加长
理想曲线两个波,前高后低4比1
一看二调多分析,调节质量不会低
参考文献:
https://blog.csdn.net/Uncle_GUO/article/details/51367764
https://wenku.baidu.com/view/5ebd4893240c844768eaee1c.html
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/145193.html原文链接:https://javaforall.net


