
大家好,又见面了,我是你们的朋友全栈君。
1.问题描述:
数字波束形成器是全数字化超声成像的基础,也是高性能彩超的保证。
数字波束形成包括发射和接收两个部分。数字是接收波束形成的关键技术,它通过使用顺序储存器FIFO或随机存取存储器双端口RAM替代模拟式波束形成器中的LC延时线来实现波束聚焦,即以数字延时补偿替代模拟延时的补偿。数字延时不仅能实现精确延时补偿,实现所谓的逐点跟踪式动态聚焦,还能方便实现动态孔径、动态变迹控制,克服模拟式延时补偿存在的诸多固有缺点,通道数增加不受限制,是图像品质得以全面提高。
2.部分程序:
close all
clear all
%%波束形成
f=[4000,5000,6000];%信号频率,单位Hz
w=[1,1,1,1,1;%每一行表示一种加权
1,2,4,2,1;
4,2,1,2,4];
fs=4*f;%采样频率取信号频率的4倍
T=0.1;%信号长度,单位s
N=T*fs;%采样点数
c=1500;%声速,m/s
d=0.15;%阵元间距,单位m
jay=sqrt(-1);%复单位
theta=-90:1:90;%观测角度范围,单位度
tao=d*sin(pi*theta/180)/c;%相邻阵元时延
xx=zeros(3,2400);%准备产生三种频率下的参考信号
for i=1:3
xx(i,1:N(i))=exp(jay*(2*pi*f(i)/fs(i)*(0:N(i)-1)));%三种频率下的参考信号
end
for j=1:3%三种频率循环
for i=1:length(tao)%不同角度循环
for k=(j-1)*5+1:(j-1)*5+5%第一种频率下的五个阵元的信号
x(k,:)=xx(j,:)*exp(-jay*2*pi*f(j)*(k-1)*tao(i));
end
r=x((j-1)*5+1:(j-1)*5+5,:)*x((j-1)*5+1:(j-1)*5+5,:)’/N(j);%求某一角度下的波束图,用公式B=w*(∑x*x’)*w’/N.
B((j-1)*3+1,i)=w(1,:)*r*w(1,:)’;%第j个频率下的第一种加权的波束图输出
B((j-1)*3+2,i)=w(2,:)*r*w(2,:)’;%第j个频率下的第二种加权的波束图输出
B((j-1)*3+3,i)=w(3,:)*r*w(3,:)’;%第j个频率下的第三种加权的波束图输出
end
end
%c产生的举证B表示B=[B11;B12;B13;B21;B22;B23;B31;B32;B33];第一个下角标表示第几个频率,第二个下角标表示第几种加权而得到的波束
for k=1:9%分别对9个波束图进行归一化和取对数
B(k,:)=real(B(k,:))/max(real(B(k,:)));%归一化
B(k,:)=20*log10(B(k,:));%取对数
end
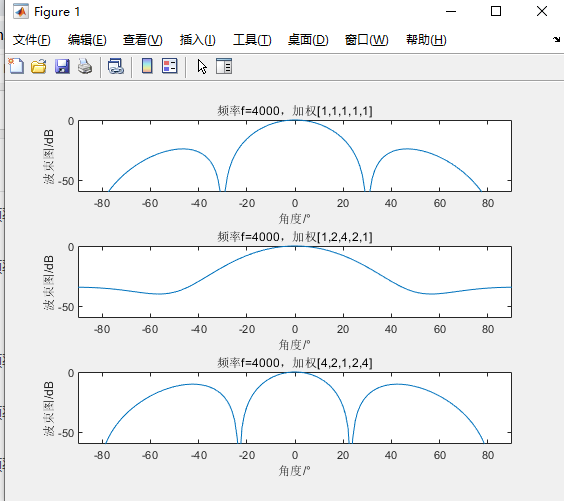
figure(1);%频率f=4000,加权不同
subplot(3,1,1);
plot(theta,B(1,:));axis([-90 90 -60 0]);title(‘频率f=4000,加权[1,1,1,1,1]’);xlabel(‘角度/°’);ylabel(‘波束图/dB’);
subplot(3,1,2);
plot(theta,B(2,:));axis([-90 90 -60 0]);title(‘频率f=4000,加权[1,2,4,2,1]’);xlabel(‘角度/°’);ylabel(‘波束图/dB’);
subplot(3,1,3);
plot(theta,B(3,:));axis([-90 90 -60 0]);title(‘频率f=4000,加权[4,2,1,2,4]’);xlabel(‘角度/°’);ylabel(‘波束图/dB’);
figure(2);%频率f=5000,加权不同
subplot(3,1,1);
plot(theta,B(4,:));axis([-90 90 -60 0]);title(‘频率f=5000,加权[1,1,1,1,1]’);xlabel(‘角度/°’);ylabel(‘波束图/dB’);
subplot(3,1,2);
plot(theta,B(5,:));axis([-90 90 -60 0]);title(‘频率f=5000,加权[1,2,4,2,1]’);xlabel(‘角度/°’);ylabel(‘波束图/dB’);
subplot(3,1,3);
plot(theta,B(6,:));axis([-90 90 -60 0]);title(‘频率f=5000,加权[4,2,1,2,4]’);xlabel(‘角度/°’);ylabel(‘波束图/dB’);
figure(3);%频率f=6000,加权不同
subplot(3,1,1);
plot(theta,B(7,:));axis([-90 90 -60 0]);title(‘频率f=6000,加权[1,1,1,1,1]’);xlabel(‘角度/°’);ylabel(‘波束图/dB’);
subplot(3,1,2);
plot(theta,B(8,:));axis([-90 90 -60 0]);title(‘频率f=6000,加权[1,2,4,2,1]’);xlabel(‘角度/°’);ylabel(‘波束图/dB’);
subplot(3,1,3);
plot(theta,B(9,:));axis([-90 90 -60 0]);title(‘频率f=6000,加权[4,2,1,2,4]’);xlabel(‘角度/°’);ylabel(‘波束图/dB’);
figure(4);%加权[1,1,1,1,1],频率不同
subplot(3,1,1);
plot(theta,B(1,:));axis([-90 90 -60 0]);title(‘频率f=4000,加权[1,1,1,1,1]’);xlabel(‘角度/°’);ylabel(‘波束图/dB’);
subplot(3,1,2);
plot(theta,B(4,:));axis([-90 90 -60 0]);title(‘频率f=5000,加权[1,1,1,1,1]’);xlabel(‘角度/°’);ylabel(‘波束图/dB’);
subplot(3,1,3);
plot(theta,B(7,:));axis([-90 90 -60 0]);title(‘频率f=6000,加权[1,1,1,1,1]’);xlabel(‘角度/°’);ylabel(‘波束图/dB’);
figure(5);%加权[1,2,4,2,1],频率不同
subplot(3,1,1);
plot(theta,B(2,:));axis([-90 90 -60 0]);title(‘频率f=4000,加权[1,2,4,2,1]’);xlabel(‘角度/°’);ylabel(‘波束图/dB’);
subplot(3,1,2);
plot(theta,B(5,:));axis([-90 90 -60 0]);title(‘频率f=5000,加权[1,2,4,2,1]’);xlabel(‘角度/°’);ylabel(‘波束图/dB’);
subplot(3,1,3);
plot(theta,B(8,:));axis([-90 90 -60 0]);title(‘频率f=6000,加权[1,2,4,2,1]’);xlabel(‘角度/°’);ylabel(‘波束图/dB’);
figure(6);%加权[4,2,1,2,4],频率不同
subplot(3,1,1);
plot(theta,B(3,:));axis([-90 90 -60 0]);title(‘频率f=4000,加权[4,2,1,2,4]’);xlabel(‘角度/°’);ylabel(‘波束图/dB’);
subplot(3,1,2);
plot(theta,B(6,:));axis([-90 90 -60 0]);title(‘频率f=5000,加权[4,2,1,2,4]’);xlabel(‘角度/°’);ylabel(‘波束图/dB’);
subplot(3,1,3);
plot(theta,B(9,:));axis([-90 90 -60 0]);title(‘频率f=6000,加权[4,2,1,2,4]’);xlabel(‘角度/°’);ylabel(‘波束图/dB’);
%计算主瓣宽度D和旁瓣级P
for k=1:9
[i,j]=find(abs(B(k,:)+3)<0.5);%误差限设在0.5dB。
D(k)=(j(length(j))-j(1))*1;%每一个点之间是一度
end %根据计算D的结果可以发现,同一种频率下三种加权分辨率最高的是第三种,其次是第一种。同一加权下,频率越高,分辨率越高
disp(‘9个波束图的参数依次为,其中分别表示:’);
disp(‘f=4000,w=[1,1,1,1,1];f=4000,w=[1,2,4,2,1];f=4000,w=[4,2,1,2,4]’);
disp(‘f=5000,w=[1,1,1,1,1];f=5000,w=[1,2,4,2,1];f=5000,w=[4,2,1,2,4]’);
disp(‘f=6000,w=[1,1,1,1,1];f=6000,w=[1,2,4,2,1];f=6000,w=[4,2,1,2,4]’);
disp(‘波束宽度为:’);
ss=sprintf(‘%d ‘,D);
disp(ss);
NN=length(theta);%每一个波束图离散的点数
for k=1:9
for i=(NN-1)/2+1:NN-1%从主波束开始往后找到第一个次级大的位置
if B(k,i)>=B(k,i+1)&&B(k,i)>=B(k,i-1)
CC(k)=B(k,i);%记录第一个次级大的分贝数
end
end
end
CC(2)=B(2,1);CC(5)=B(5,1);%由于在[-90,90]度的范围内,第二种和第五种情况下没有找到次级大,故用它在-90°的地方分贝数近似。
disp(‘旁絆级为:’);
s=sprintf(‘%f ‘,CC);
disp(s);
3.仿真结论:

D00003
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/147650.html原文链接:https://javaforall.net


