
大家好,又见面了,我是你们的朋友全栈君。
目录
redis的启动
在我的linux启动redis
首先进入到安装redis的目录下
(记住是你的redis-4.0.2目录中的src目录下,每个人的安装位置有所不同)
cd /usr/local/redis/redis-4.0.2/src


启动redis-server服务
./redis-server
(注意有一个点! ./ 表示当前目录下)
这种启动为前台启动,所以一般直接再VM中启动
然后在Xshell中远程控制,启动redis客户端
./redis-cli

可以看到会有默认端口6379
这时就可以使用redis了
设置redis密码
在/usr/local/redis/redis-4.0.2中有一个redis.conf文件
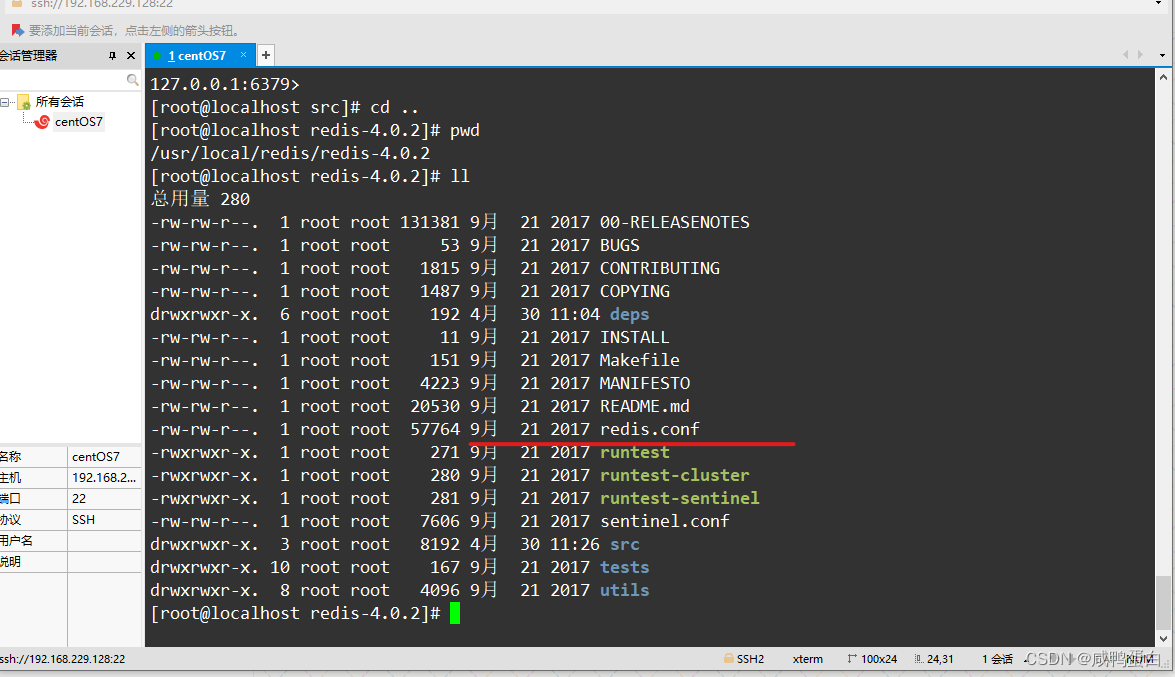
使用vim命令编辑这个文件
vim redis.conf
里面的文件内容很多,输入/pass 即 查找含有pass的地方
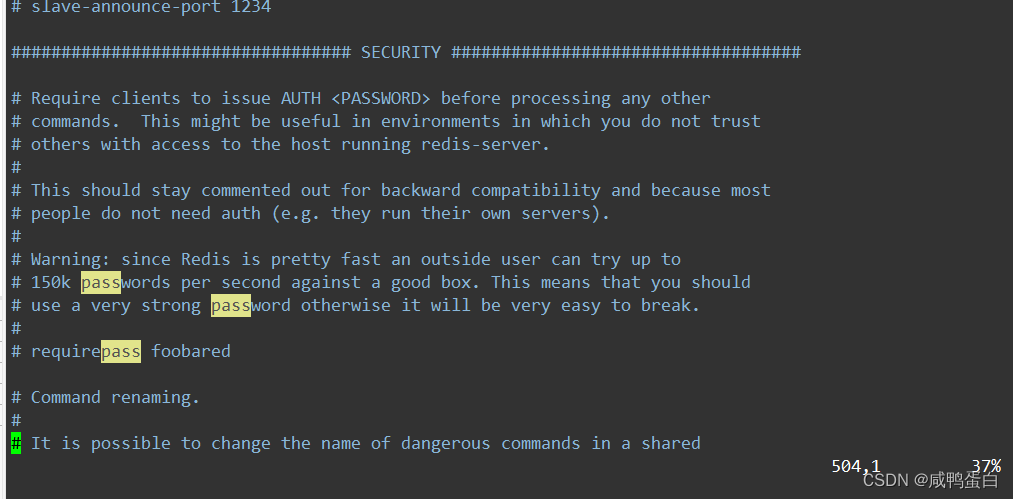
可以找到一个requirepass foobared
把注释符号删除,然后后面的foobared改成我们需要的密码
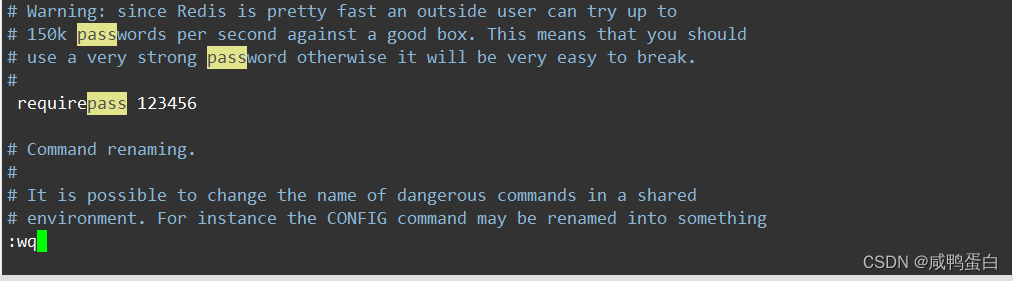
esc退出编辑模式,再输入 :wq (保存)
那么设置了密码有什么用呢?如何登录呢?
当编辑了密码之后,启动时输入的命令会有所不同
首先进入到 /usr/local/redis/redis-4.0.2/ 目录下
输入:src/redis-server ./redis.conf
即指定了启动时加载 redis.conf 文件
这个时候再去我们的Xshell中输入 ./redis-cli 你会发现依然能够连接上

但是当你想要操作数据时,就会报错

输入:auth 123456
就可以使用了。
redis-server后台启动
前面看到了啊,又是在VM中启动服务,又是在Xshell中启动客户端的,多麻烦。
那么如果将redis-server后台启动,这样不久可以直接在Xshell中启动服务之后还可以启动客户端么?
同样,输入 vim redis.conf
进入到文件中,查找daemonize :
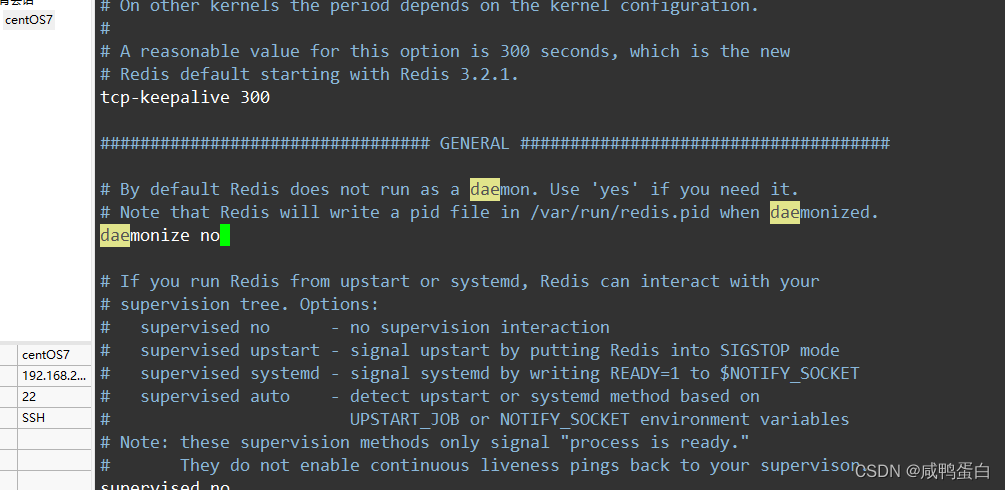
你会看到一个 daemonize no
将no 改为 yes ,表示可以后台启动
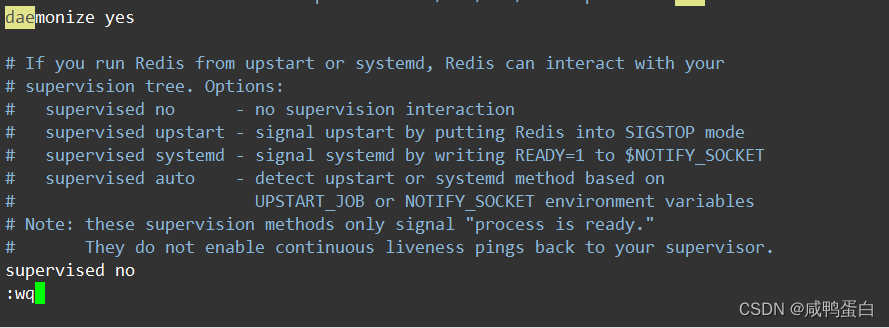
保存退出
再次启动服务

就实现了后台启动啦。
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/150574.html原文链接:https://javaforall.net


