
大家好,又见面了,我是你们的朋友全栈君。
在linux下进行多线程编程,肯定会涉及到线程通信问题,本文主要分析pipe,即管道在多线之间通信实现。
#include<unistd.h>
int pipe(int filedes[2]);
返回值:成功,返回0,否则返回-1。
参数数组包含pipe使用的两个文件的描述符。fd[0]:读管道,fd[1]:写管道
两个线程之间通信简单实现,单向pipe_1.c
源码地址:https://github.com/jeremy505/multi-thread-communication
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <pthread.h>
Thread *m_Threads;
static int threadcount = 1;
void* work_thread(void* argc)
{
Thread* param = (Thread*) argc;
printf("childthread_tid=%lu\n", param->tid);
int contant = 0;
//sleep(2);
printf("childthread--read return %d\n",read(param->notifyReceiveFd, &contant, sizeof(int)));
printf("childthread--read from pipe %d\n", contant);
}
int main(int argc, char** argv)
{
//在主线程和子线程之间建立管道
m_Threads = malloc(sizeof(Thread) * threadcount);
int fds[2];
if( pipe(fds) )
{
perror("create pipe error");
}
m_Threads[0].notifyReceiveFd = fds[0];
pthread_create(&m_Threads[0].tid, NULL, work_thread, (void*)&m_Threads[0]);
printf("mainthread_tid=%lu\n", m_Threads[0].tid);
int contant = 1;
// sleep(2);
printf("mainthread--write %d to pipe\n", contant);
printf("mainthread--write return %d\n",write(fds[1], &contant, sizeof(int)));
pthread_join(m_Threads[0].tid, NULL);
close(fds[0]);
close(fds[1]);
return 0;
}
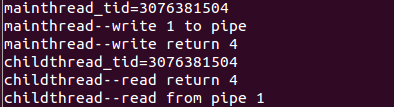
以上只是单向通信,即主线程向子线程写int型值1,子线程读到int型值1.
输出见下:

可见,输出与设想的一致,只是此时通信只是单向,如果要实现双向,最简单的办法就是再创建一组pipe,实现pipe_1_d.c如下:

#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <pthread.h>
typedef struct __Thread
{
pthread_t tid; //线程的ID
int notifyReceiveFd; //管道的接收端
int notifySendFd; //管道的发送端
}Thread;
Thread *m_Threads;
static int threadcount = 1;
void* work_thread(void* argc)
{
Thread* param = (Thread*) argc;
printf("childthread_tid=%lu\n", param->tid);
int contant = 0;
//sleep(2);
printf("childthread--read return %d\n",read(param->notifyReceiveFd, &contant, sizeof(int)));
printf("childthread--read from pipe %d\n", contant);
contant = 2;
printf("childthread--write %d to pipe\n", contant);
printf("childthread--write return %d\n",write(param->notifySendFd, &contant, sizeof(int)));
}
int main(int argc, char** argv)
{
//在主线程和子线程之间建立管道
m_Threads = malloc(sizeof(Thread) * threadcount);
int fds[2];
if( pipe(fds) )
{
perror("create pipe fds error");
}
int fds_1[2];
if( pipe(fds_1) )
{
perror("create pipe fds_1 error");
}
m_Threads[0].notifyReceiveFd = fds[0];
m_Threads[0].notifySendFd = fds_1[1];
pthread_create(&m_Threads[0].tid, NULL,
work_thread, (void*)&m_Threads[0]);
printf("mainthread_tid=%lu\n", m_Threads[0].tid);
int contant = 1;
// sleep(2);
printf("mainthread--write %d to pipe\n", contant);
printf("mainthread--write return %d\n",write(fds[1], &contant, sizeof(int)));
printf("mainthread--read return %d\n",read(fds_1[0], &contant, sizeof(int)));
printf("mainthread--read from pipe %d\n", contant);
pthread_join(m_Threads[0].tid, NULL);
close(fds[0]);
close(fds[1]);
close(fds_1[0]);
close(fds_1[1]);
}
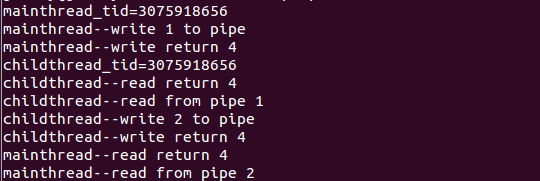
另外创建一组pipe,主线读,子线程写。主线程先写1,然后阻塞等待子线程网管道中写值,子线程通过管道读到1之后往管道写2,此时管道有数据,主线程读取值2,输出如下:
以上只是简单的通过pipe线程之间进行同行,注意到读写都是阻塞的。如果不希望线程使用阻塞方式,一般会设置管道文件描述符为非阻塞,然后借助epoll或者select监听管道文件描述符读写事件。
线程之间通过pipe通信也可以应用到进程之间,在使用fork之后,管道描述符被拷贝了一份,所以父子进程必须关闭其中之一,假设父进程关闭读[close(fd[0])],子进程就要关闭写[close(fd[1])],,实现单向通信,反过来也是一样.
进程之间的通信,推荐一种方式使用共享内存,共享内存区是最快的IPC形式,此种方式也可在两个完全独立的程序之间进行数据传递,后续再详细介绍。
当然,进程以及线程之间的通信不止以上方法,还有使用socket,eventfd等。
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/150749.html原文链接:https://javaforall.net


