
大家好,又见面了,我是你们的朋友全栈君。
语音识别智能分类垃圾桶
基本介绍
这个一个基于51单片机做的一个语音识别分类智能垃圾桶,我这里用的是STC89C52 通过我们说话来对垃圾词语进行分类。比如:垃圾桶(一级指令)易拉罐(垃圾词语),我们通过说话 说出关键字 让语音模块 接收到 —— 语音模块通过串口发指令给51单片机,针对指令 51单片机发指令和语音合成模块,让喇叭说话、 并且控制指令对应的舵机从而实现对垃圾桶开盖。实现起来其实不难。
器件
51单片机

LD3320语音模块
我用的是这个 飞音云店铺的 开源的。
SYN6288语音合成

SG90舵机(4个)
180°不带限位。

usb-ttl模块

垃圾桶四个(4个)

面包板(建议用)
其他
还有什么杜邦线啥的这里就不说了。
实现思路与接线
实现流程图
这图自己画的哈哈哈 也还行吧 美术生的功底没能展示出来。
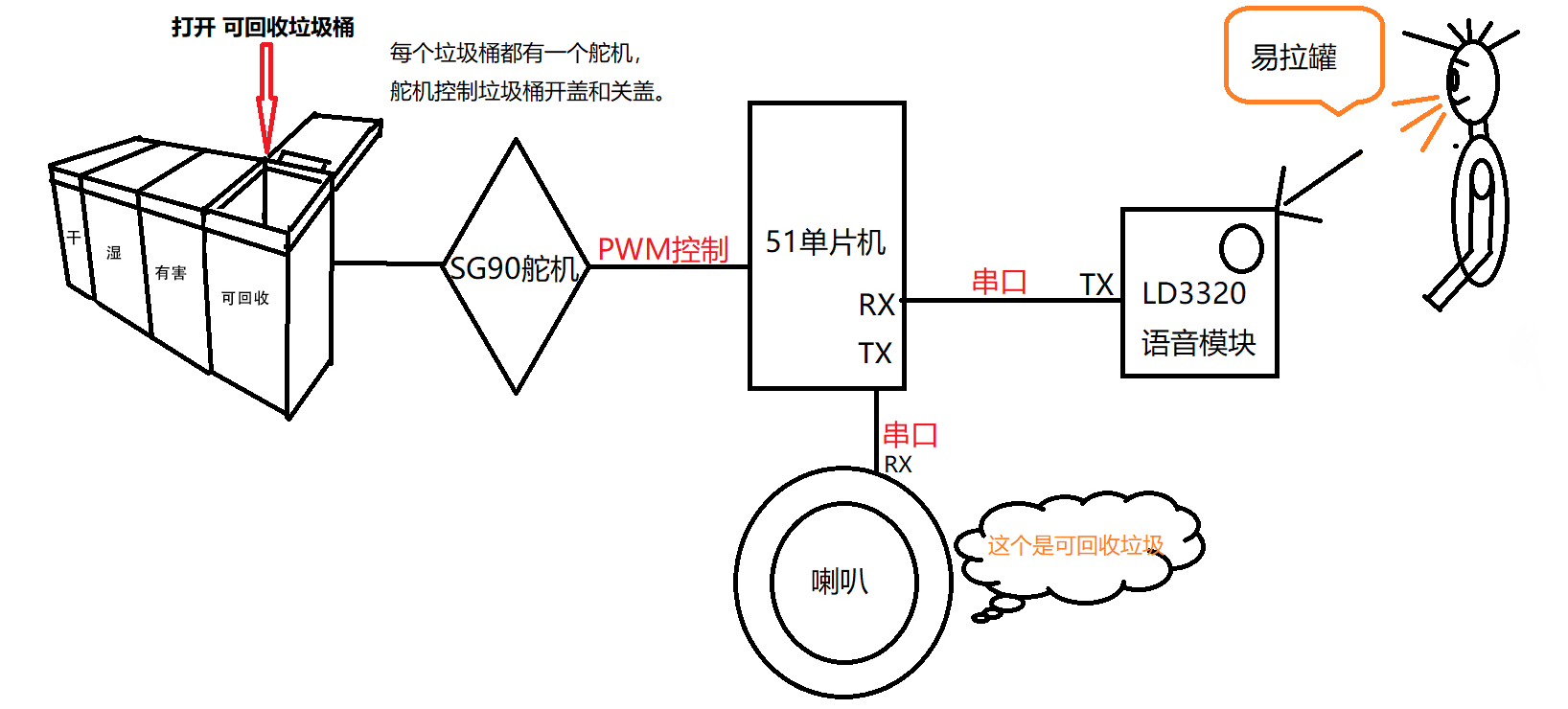
人说话——语音模块识别——发指令给51单片机——51根据指令控制舵机 and 控制语音合成进行 播报。
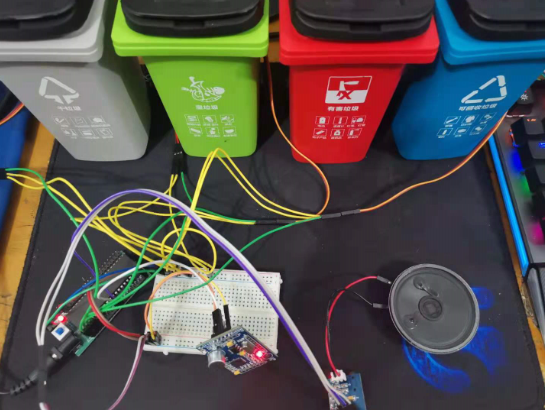
呈现图
接线
注意供电问题 有时候供电不够会导致效果不太好
如果有多个 VCC 可以 分来接 舵机 和 语音 和 SYN6288。
语音模块:5V供电
SYN6288:5V供电
舵机: 5V 3.3V都可
| 51单片机 | SYN6288语音播报 |
|---|---|
| VCC(5V) | VCC |
| GND | GND |
| TX | RX |
| 51单片机 | LD3320语音模块 |
|---|---|
| VCC(5V) | VCC |
| GND | GND |
| RX | TX |
| 51单片机 | 舵机 |
|---|---|
| VCC(5V / 3.3V) | VCC |
| GND | GND |
| P1.0 | 舵机1 信号线 |
| P1.1 | 舵机2 信号线 |
| P1.2 | 舵机3 信号线 |
| P1.3 | 舵机4 信号线 |
代码编写
语音模块(部分代码)
语音模块 厂家是有给源码的,我们只需要改成我们需要的就行。
厂家给的文件:
LDChip.c
uint8 LD_AsrAddFixed()
{
uint8 k, flag;
uint8 nAsrAddLength;
#define DATE_A 50 /*数组二维数值*/
#define DATE_B 70 /*数组一维数值*/
uint8 code sRecog[DATE_A][DATE_B] = {
"la ji tong",\
"yan tou",\
"jiao shui",\
"jiao dai",\
"fan qie",\
"guo pi",\
"sheng cai",\
"fei jiu dian chi",\
"guo qi yao pin",\
"sha chong ji",\
"kuang quan shui ping",\
"bao zhi",\
"yi la guan"
}; /*添加关键词,用户修改*/
uint8 code pCode[DATE_A] = {
CODE_CMD,\
CODE_YT,\
CODE_JS,\
CODE_JD,\
CODE_FQ,\
CODE_GP,\
CODE_SC,\
CODE_FJDC,\
CODE_GQYP,\
CODE_SCJ,\
CODE_KQSP,\
CODE_BZ,\
CODE_YLG
}; /*添加识别码,用户修改*/
}
厂家给的文件:
main.c
void User_handle(uint8 dat)
{
//UARTSendByte(dat);//串口识别码(十六进制)
if(0==dat)
{
G0_flag=ENABLE;
LED=0;
UARTSendByte('1'); /*text.....*/
}
else if(ENABLE==G0_flag)
{
G0_flag=DISABLE;
LED=1;
switch(dat) /*对结果执行相关操作,客户可删除Printcom 串口输出语句替换为其他需要控制的代码*/
{
/*干垃圾*/
case CODE_YT:
UARTSendByte('G'); /*text.....*/
break;
case CODE_JS:
UARTSendByte('G'); /*text.....*/
break;
case CODE_JD:
UARTSendByte('G'); /*text.....*/
break;
/*湿垃圾*/
case CODE_FQ:
UARTSendByte('S'); /*text.....*/
break;
case CODE_GP:
UARTSendByte('S'); /*text.....*/
break;
case CODE_SC:
UARTSendByte('S'); /*text.....*/
break;
/*有害垃圾*/
case CODE_FJDC:
UARTSendByte('Y'); /*text.....*/
break;
case CODE_GQYP:
UARTSendByte('Y'); /*text.....*/
break;
case CODE_SCJ:
UARTSendByte('Y'); /*text.....*/
break;
/*可回收垃圾*/
case CODE_KQSP:
UARTSendByte('K'); /*text.....*/
break;
case CODE_BZ:
UARTSendByte('K'); /*text.....*/
break;
case CODE_YLG:
UARTSendByte('K'); /*text.....*/
break;
default: //啥也不做
break;
}
}
}
语音模块串口调试结果
测试:垃圾桶 易拉罐 垃圾桶 果皮

这边语音模块是没啥问题了,我们先单个模块这样编写代码,完事整合一起就是一个智能垃圾桶了。
SYN6288语音播报
SYN6288资料
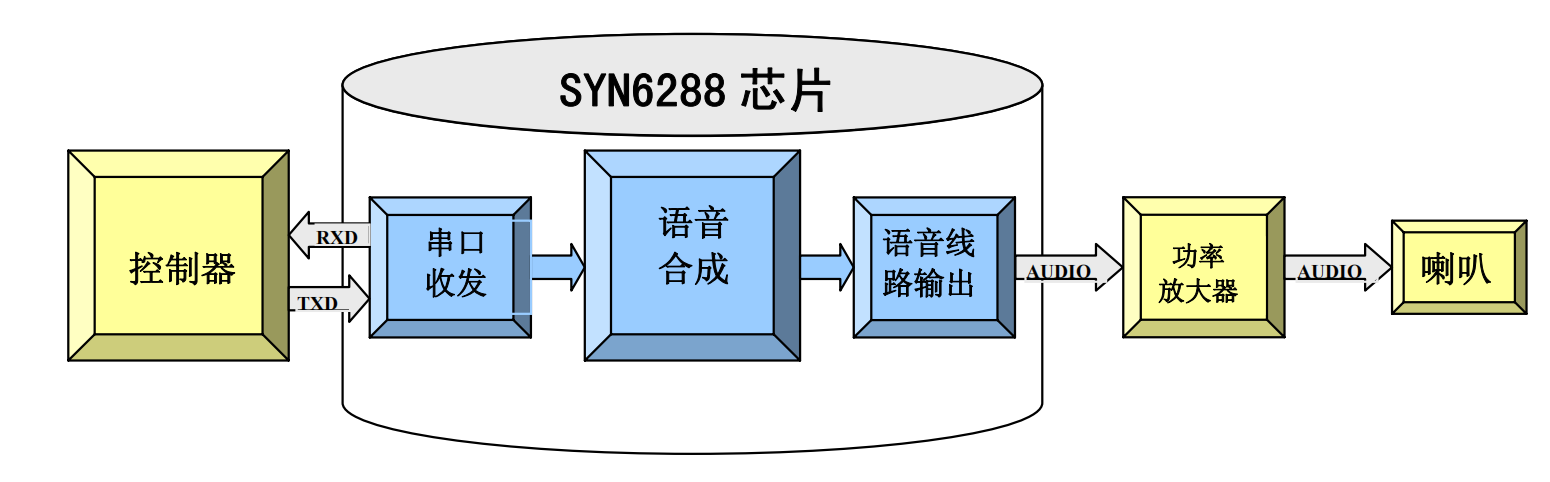
SYN6288模块原理图:

语音合成命令:

51单片机控制SYN6288语音播报 程序代码
可以参考我写的这篇文章。
舵机
51单片机控制舵机 程序代码
可以参考我写的这篇文章。
51单片机—智能垃圾桶 程序代码(部分)
部分代码
main.c
#include <reg52.h>
#include "syn6288.h"
#include "delay.h"
#include "uart.h"
unsigned int count; //次数标识
unsigned int angle=5; //角度标识
sbit pwmg = P1^0; //PWM信号输出
sbit pwms = P1^1; //PWM信号输出
sbit pwmy = P1^2; //PWM信号输出
sbit pwmk = P1^3; //PWM信号输出
unsigned char value = 0; //控制舵机 标志位
unsigned char send_flag_ok = 1; //1 允许发送 0不允许发送
unsigned char receive_flag_ok = 0; //0不允许接收 1 允许接收
/*****************SYN6288芯片设置命令*********************/
unsigned char SYN_StopCom[] = {
0xFD, 0X00, 0X02, 0X02, 0XFD}; //停止合成
unsigned char SYN_SuspendCom[] = {
0XFD, 0X00, 0X02, 0X03, 0XFC}; //暂停合成
unsigned char SYN_RecoverCom[] = {
0XFD, 0X00, 0X02, 0X04, 0XFB}; //恢复合成
unsigned char SYN_ChackCom[] = {
0XFD, 0X00, 0X02, 0X21, 0XDE}; //状态查询
unsigned char SYN_PowerDownCom[] = {
0XFD, 0X00, 0X02, 0X88, 0X77}; //进入POWER DOWN 状态命令
/*主函数入口*/
void main(void)
{
uart_Init(); //启动串口
receive_flag_ok = 1; //可以接收
send_flag_ok = 0; //禁止发送
timer0_Init(); //启动定时器
/*死循环*/
while(1)
{
switch(value)
{
case 'e':
{
ET0 = 0; //打开定时器0 中断
send_flag_ok = 1; //开发送
SYN_FrameInfo(0, "[v16][t5]我在");
value = 0;
/*禁发送 开接收*/
send_flag_ok = 0; //禁发送
ET0 = 1;
break;
}
case 0:
/*禁发送 开接收*/
send_flag_ok = 0;
receive_flag_ok = 1;
break;
case 5:
{
send_flag_ok = 0; //禁发送
receive_flag_ok = 0;//开接收
for(angle=14;angle>4;angle--)//开盖
{
delay_ms(2);
}
send_flag_ok = 1;
ET0 = 0;
SYN_FrameInfo(0, "[v16][t5]这个是干垃圾");
delay2s();
ET0 = 1;
send_flag_ok = 0;
for(angle=4;angle<14;angle++)//关盖 从0到88度,步进11度
{
delay_ms(2);
}
value = 0;
receive_flag_ok = 1;
break;
}
case 6:
{
send_flag_ok = 0;
receive_flag_ok = 0;
for(angle=16;angle>4;angle--)//开盖
{
delay_ms(2);
}
send_flag_ok = 1;
ET0 = 0;
SYN_FrameInfo(0, "[v16][t5]这个是湿垃圾");
delay2s();
ET0 = 1;
send_flag_ok = 0;
for(angle=4;angle<16;angle++)//关盖 从0到88度,步进11度
{
delay_ms(2);
}
value = 0;
receive_flag_ok = 1;
break;
}
case 7:
{
send_flag_ok = 0;
receive_flag_ok = 0;
for(angle=14;angle>4;angle--)//开盖
{
delay_ms(2);
}
send_flag_ok = 1;
ET0 = 0;
SYN_FrameInfo(0, "[v16][t5]这个是有害垃圾");
delay2s();
ET0 = 1;
send_flag_ok = 0;
for(angle=4;angle<14;angle++)//关盖 从0到88度,步进11度
{
delay_ms(2);
}
value = 0;
receive_flag_ok = 1;
break;
}
case 8:
{
send_flag_ok = 0;
receive_flag_ok = 0;
for(angle=4;angle<14;angle++)//开盖 从0到88度,步进11度
{
delay_ms(2);
}
send_flag_ok = 1;
ET0 = 0;
SYN_FrameInfo(0, "[v16][t5]这个是可回收垃圾");
delay2s();
ET0 = 1;
send_flag_ok = 0;
for(angle=14;angle>4;angle--)//关盖
{
delay_ms(2);
}
value = 0;
receive_flag_ok = 1;
break;
}
default:
send_flag_ok = 0;
receive_flag_ok = 1;
break;
}
}
}
syn6288.c
#include <reg52.h>
#include <string.h>
#include "uart.h"
#include "syn6288.h"
/**************芯片设置命令*********************/
/*外部声明*/
extern unsigned char SYN_StopCom[];
extern unsigned char SYN_SuspendCom[];
extern unsigned char SYN_RecoverCom[];
extern unsigned char SYN_ChackCom[];
extern unsigned char SYN_PowerDownCom[];
//Music: 0:无背景音乐 1~15:选择背景音乐
void SYN_FrameInfo(unsigned char Music, unsigned char *HZdata)
{
/****************需要发送的文本**********************************/
unsigned char Frame_Info[50];
unsigned char HZ_Length;
unsigned char ecc = 0; //定义校验字节
unsigned int i = 0;
HZ_Length = strlen((char*)HZdata); //需要发送文本的长度
/*****************帧固定配置信息**************************************/
Frame_Info[0] = 0xFD ; //构造帧头FD
Frame_Info[1] = 0x00 ; //构造数据区长度的高字节
Frame_Info[2] = HZ_Length + 3; //构造数据区长度的低字节
Frame_Info[3] = 0x01 ; //构造命令字:合成播放命令
Frame_Info[4] = 0x01 | Music << 4 ; //构造命令参数:背景音乐设定
/*******************校验码计算***************************************/
for(i = 0; i < 5; i++) //依次发送构造好的5个帧头字节
{
ecc = ecc ^ (Frame_Info[i]); //对发送的字节进行异或校验
}
for(i = 0; i < HZ_Length; i++) //依次发送待合成的文本数据
{
ecc = ecc ^ (HZdata[i]); //对发送的字节进行异或校验
}
/*******************发送帧信息***************************************/
memcpy(&Frame_Info[5], HZdata, HZ_Length);
Frame_Info[5 + HZ_Length] = ecc;
UART1_SendString(Frame_Info, 5 + HZ_Length + 1);
}
项目展示

基于 51单片机的其他项目
基于51单片机+遥控灯
基于51单片机+SG舵机
基于51单片机+LCD1602显示
基于51单片机+红外遥控解码+LCD1602显示
基于51单片机+DHT11温湿度+LCD1602显示
基于51单片机+DS18B20温度测温器+LCD1602显示
基于51单片机+SYN6288语音播报
基于51单片机+ESP8266模块(HTTP)上传温湿度到oneNET APP显示+LCD1602显示
总结
我做一个一开始是用的 普中的51单片机 2.0板子 ,供电啥的都还可以,如果是用最小系统的板子 如果程序没问题要看板子的供电是不是不太稳的 ,如果两个或者多个 接到单片机的同一个VCC 可能会引起供电不稳定,导致项目有时候没啥反应。总的来说 垃圾桶这个实现是不算难的,应该是属于简单的了,会点51的小伙伴可以来做做一个智能垃圾桶,可以用来比赛的,可以优化,增加新的功能啥的 这都是可以的。最近实在太忙了,用的几天的的时候,每天抽时间写下了这篇文章,觉得好的可以点赞哈。还得继续加油!
如果觉得这篇文章对你有用。欢迎大家点赞、评论哈哈
需要整个工程代码和 模块的相关资料,私信我 或者 +我扣扣:844797079。或者评论区留下的你的联系方式。
继续加油!!!
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/153111.html原文链接:https://javaforall.net


