
大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE使用 1年只要46元 售后保障 童叟无欺
前言
前几天制作了无刷四轴飞控板(STM32F103C8T6开发板+GY521制作NAZE32飞控板详细图文教程),效果还不错,在此基础上加了MOS驱动电路,把这个飞控装在了空心杯小四轴上,成功把它救活。现把制作过程记录如下。
1.材料清单
CH340串口下载模块1个(2.5元)


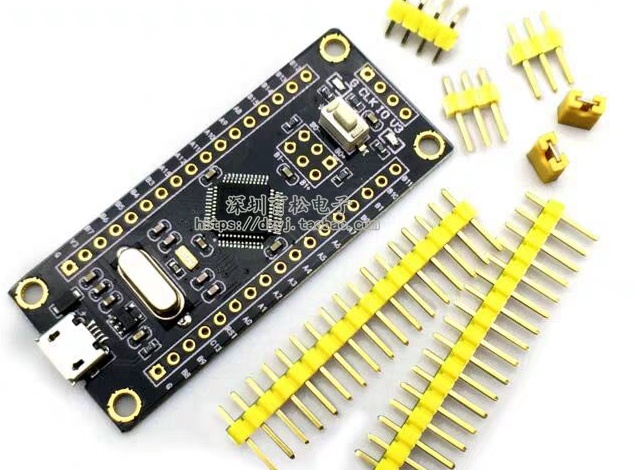
STM32F103C8T6黑色开发板1个(11.5元,也可以使用蓝色板)
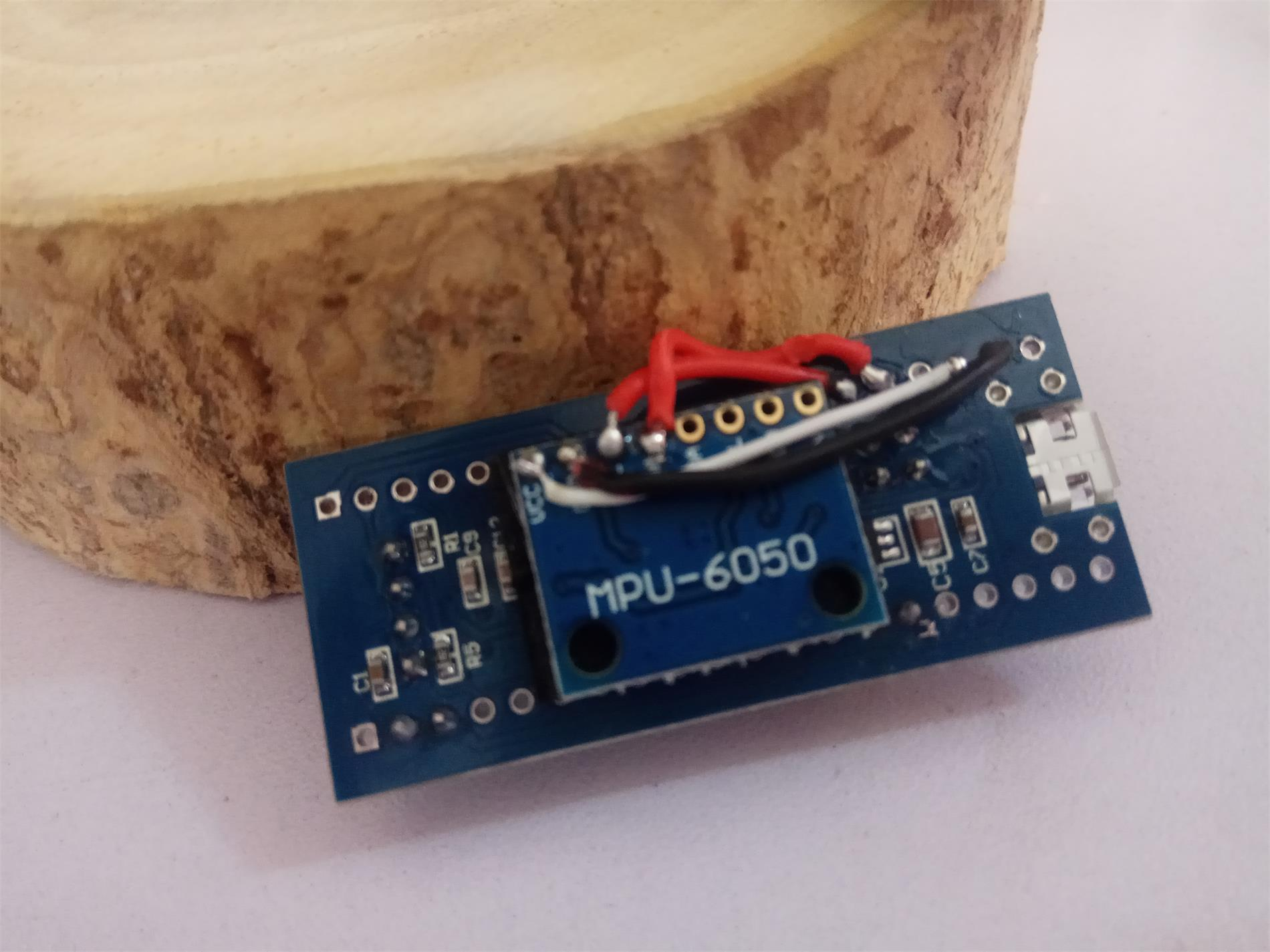
GY-521加速度计模块1个(3.8元)

IRLML2502TRPBF N沟道MOSFET贴片4个

1N5819肖特基二极管2个

SS8050三极管2个

470Ω电阻4个,1k电阻1个,10k电阻5个

还有线材、插针若干,以上这些材料大部分可以一站式购齐的,其中一些耗材简直电子爱好者必备,可以适当多买点。
2.焊接飞控板
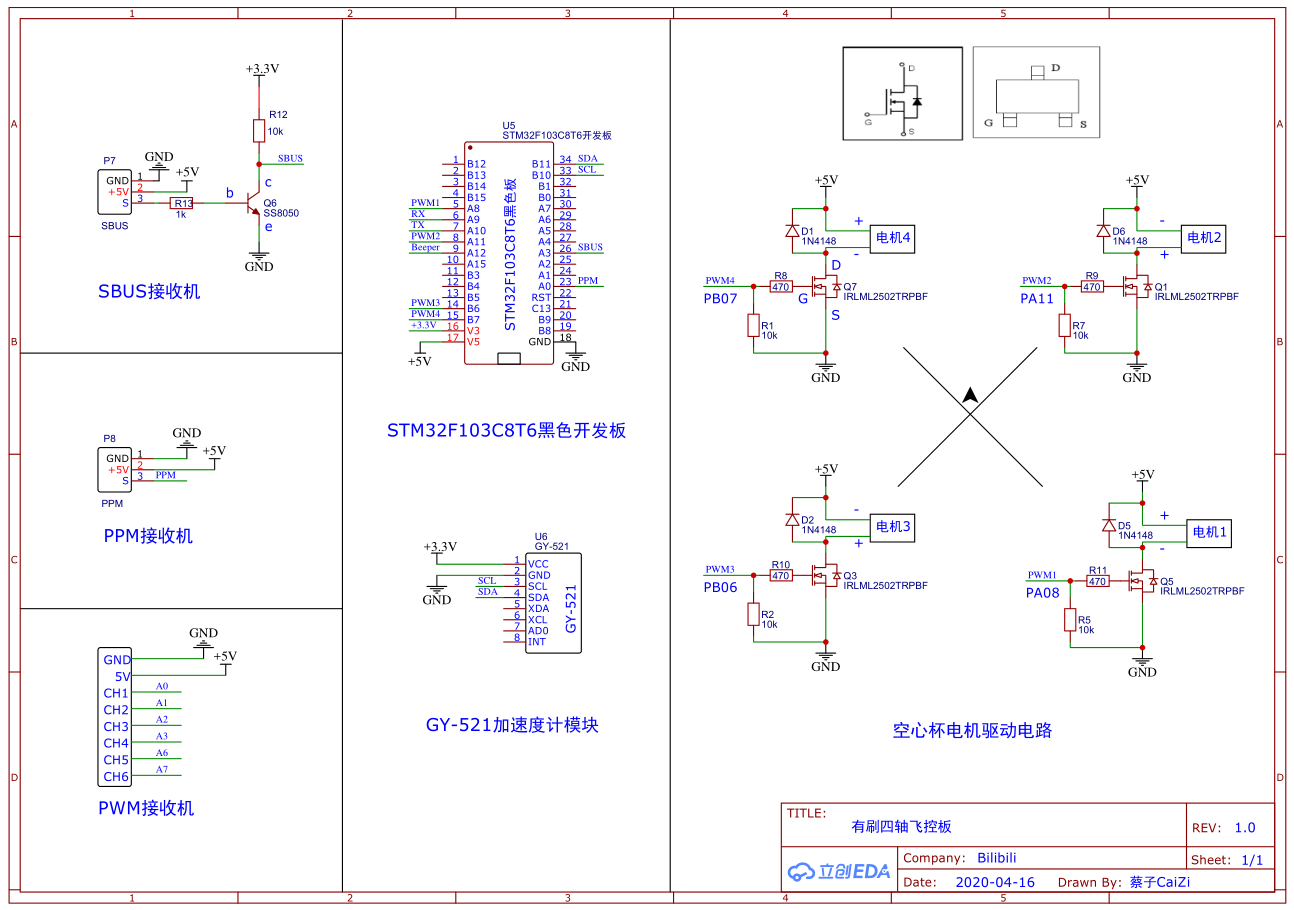
飞控板原理图如下,要焊接的引脚不多,只是注意一下走线,按照自己的意愿来就可以了。
有三种接收机模式可以选择:SBUS(三根线)、PPM(三根线)、PWM(每个通道都要接线-8根线)。
4个空心杯电机的正负极有讲究,对角线上的接法相同(转向相同)。不装桨的情况下轻触转轴判断转向,如果和软件中转向不同,则需要对调电机的正负接线。
MOS管建议用大电流的,笔者一开始用的AO3400最大电流只有2.8A,带不动电机很容易烧,后来换了IRLML2502TRPBF最大电流4.2A很给力!
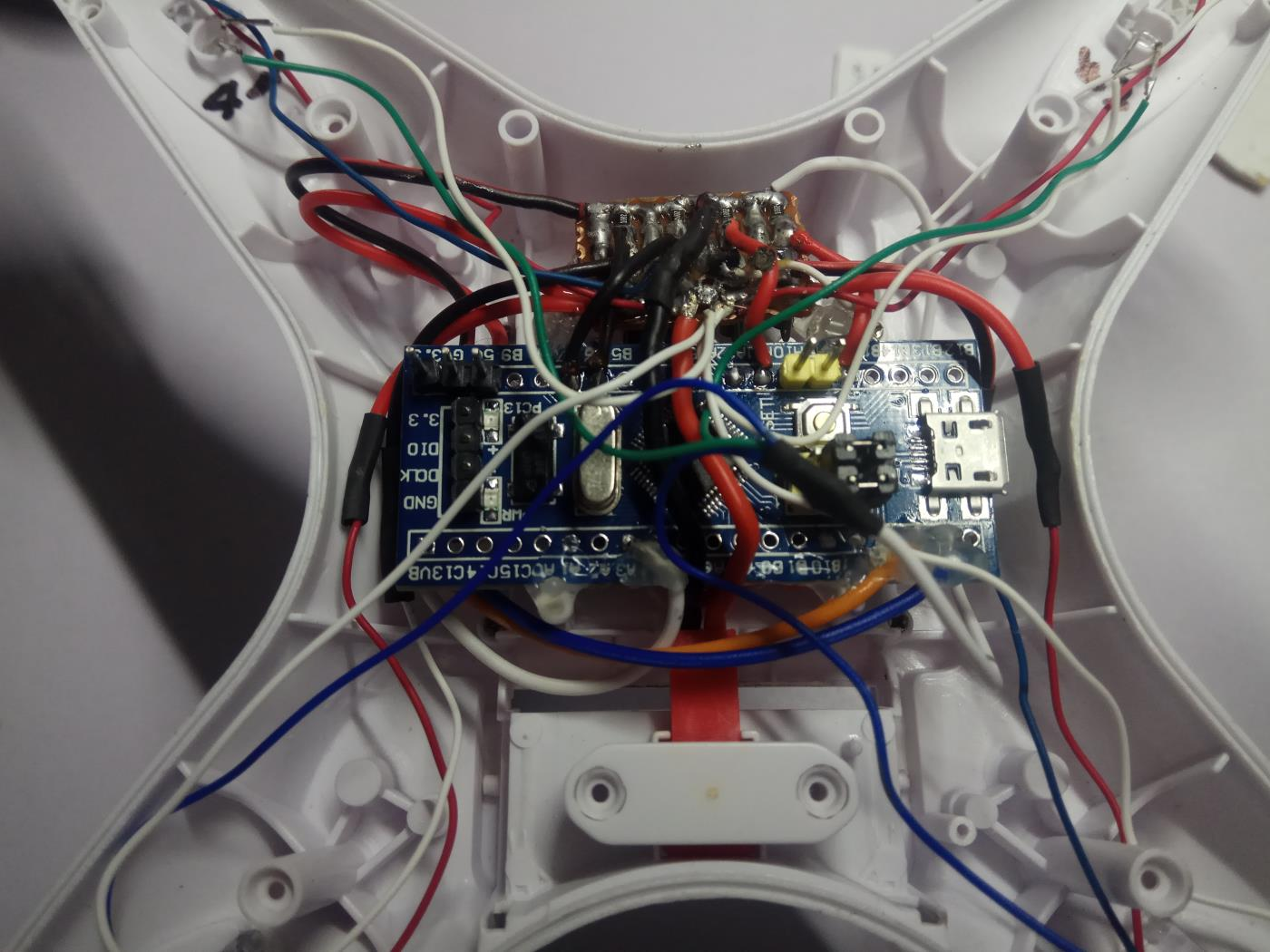
飞控板接线
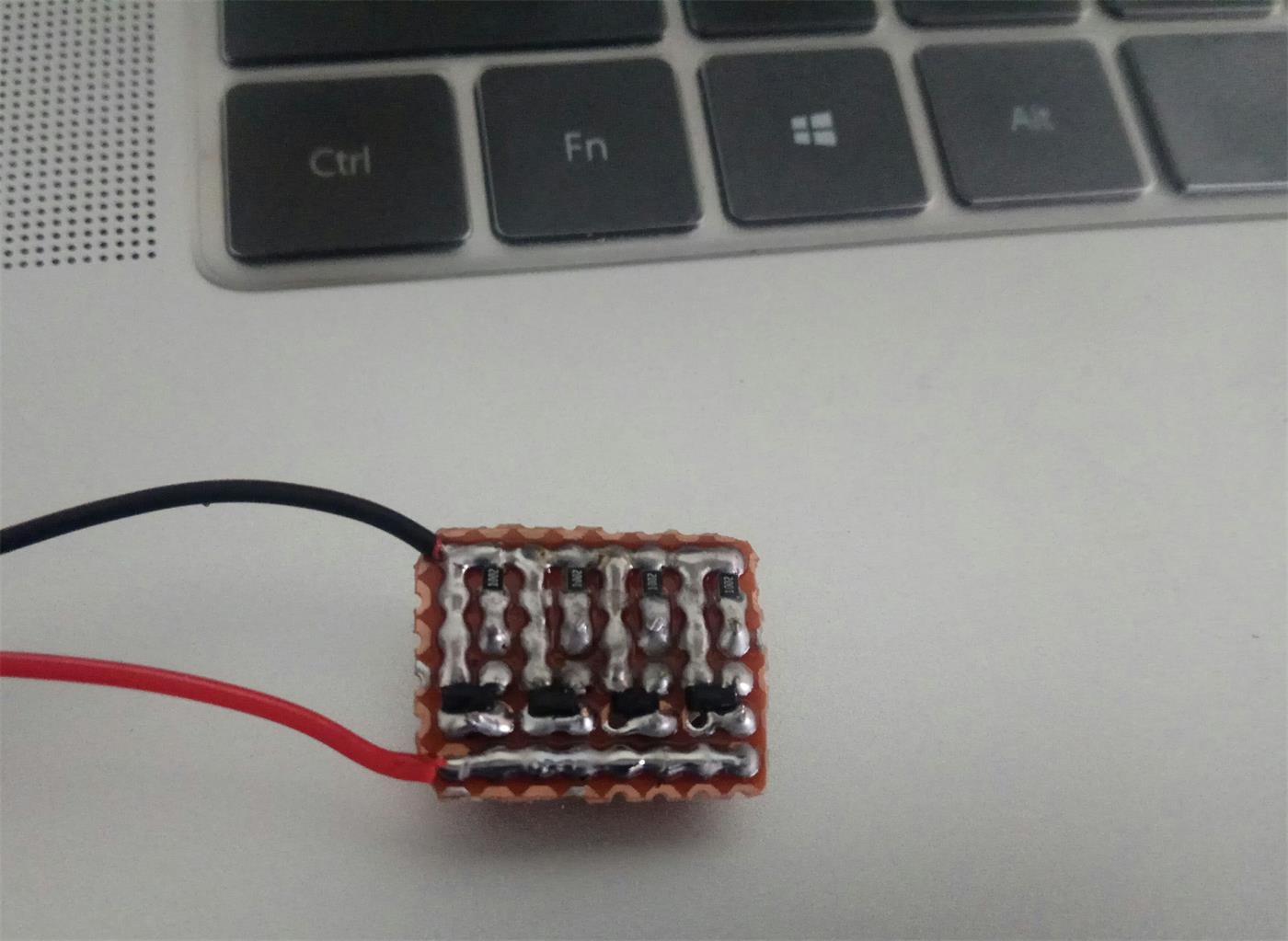
四个空心杯的MOS驱动板正面(只有一个按键大小)

背面(元件较密集,焊接好后先量一下是否有短路,10k电阻用了贴片的)
装到飞机里面的效果
3.烧写Betaflight固件
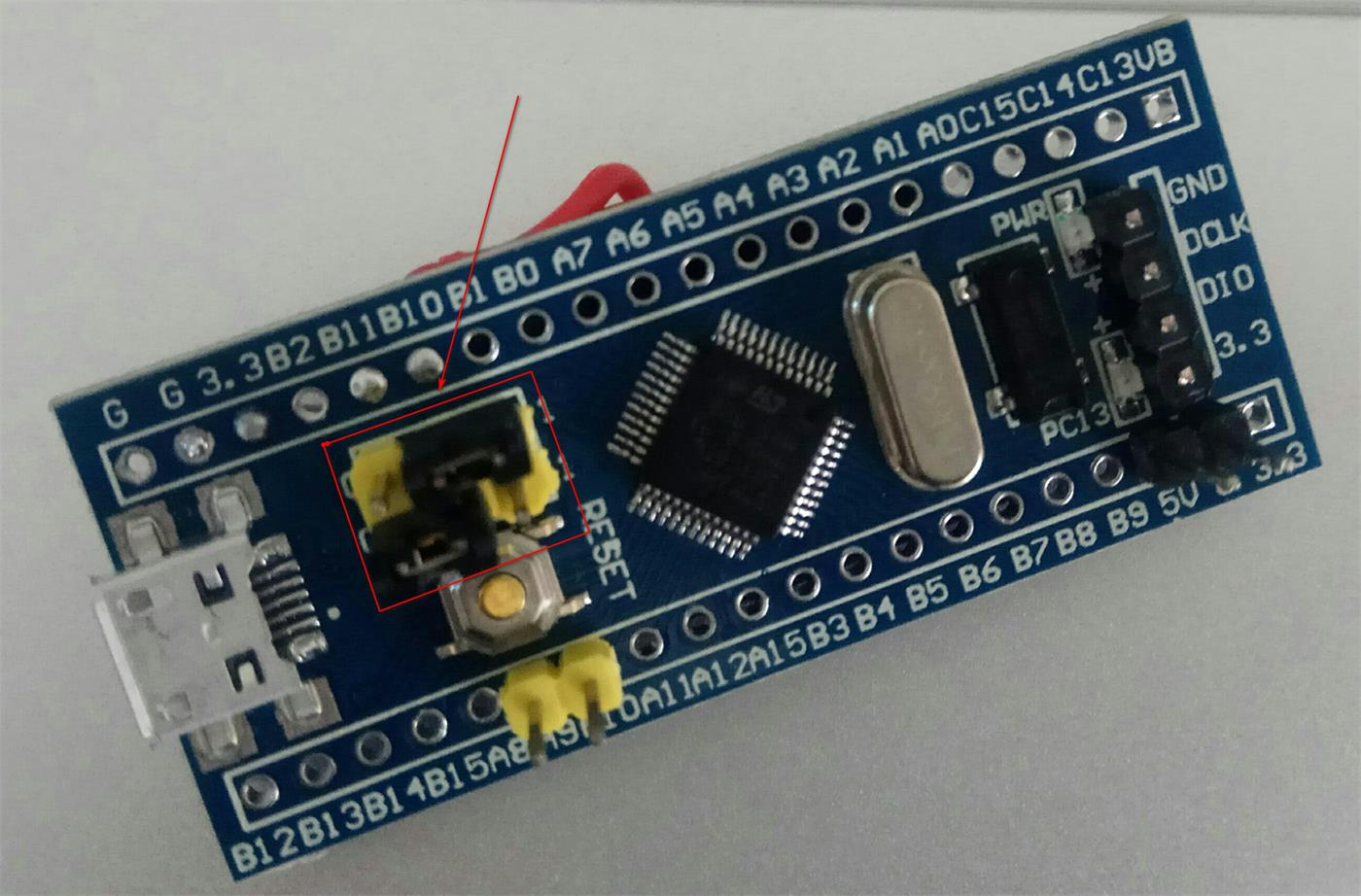
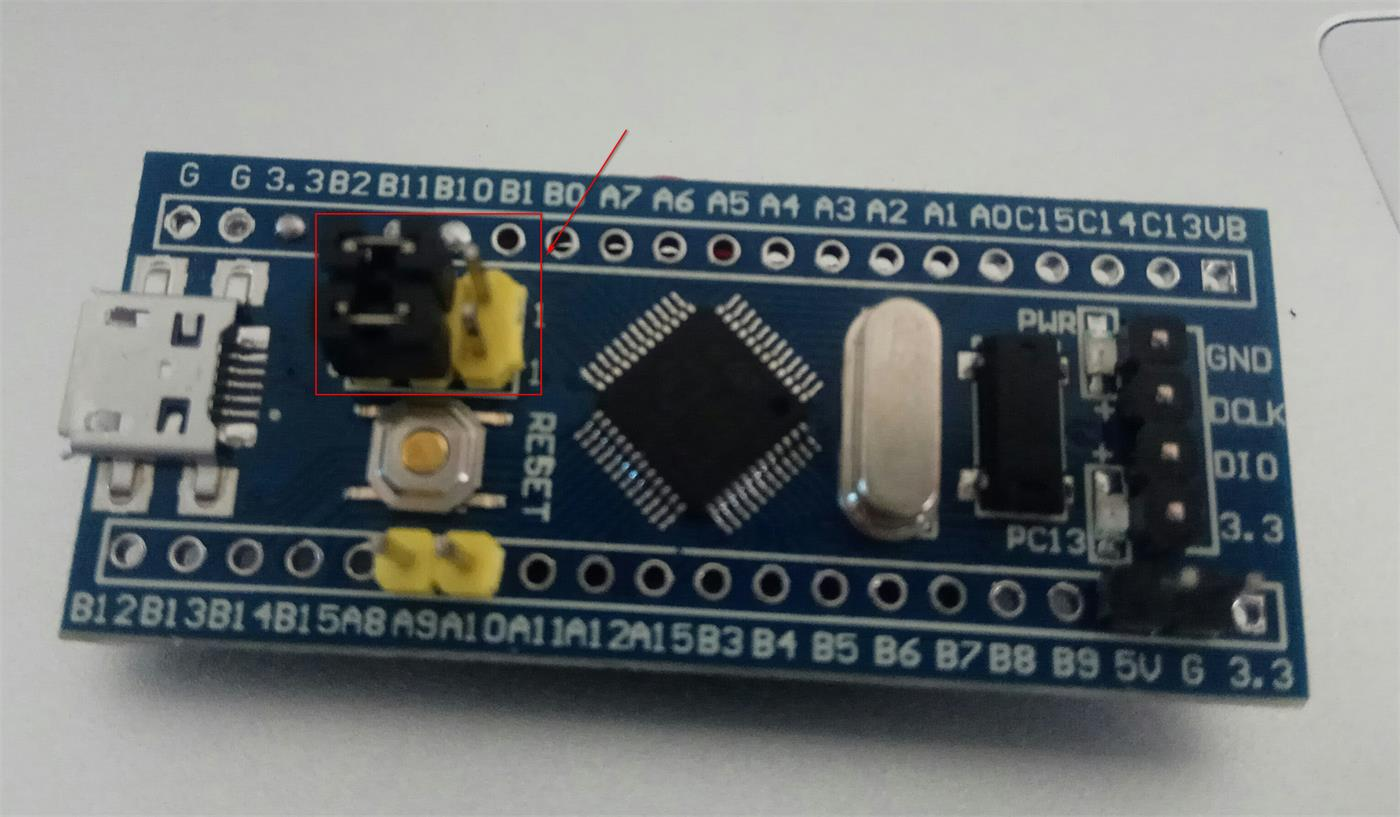
将STM32F103C8T6开发板上的两个boot引脚如下设置为Bootloader模式:
b0–>b+
b1–>b-
蓝色板的短接帽接法如下图:
将飞控板与CH340串口下载器连接,接线关系如下:
GND-GND;
V3–3V3;
A9(RX)–RXD;
A10(TX)–TXD
如果连接不上电脑,可以尝试把RX/TX对调一下,也可以另接一个5V电源到飞控板上(防止串口下载器供电不足)。
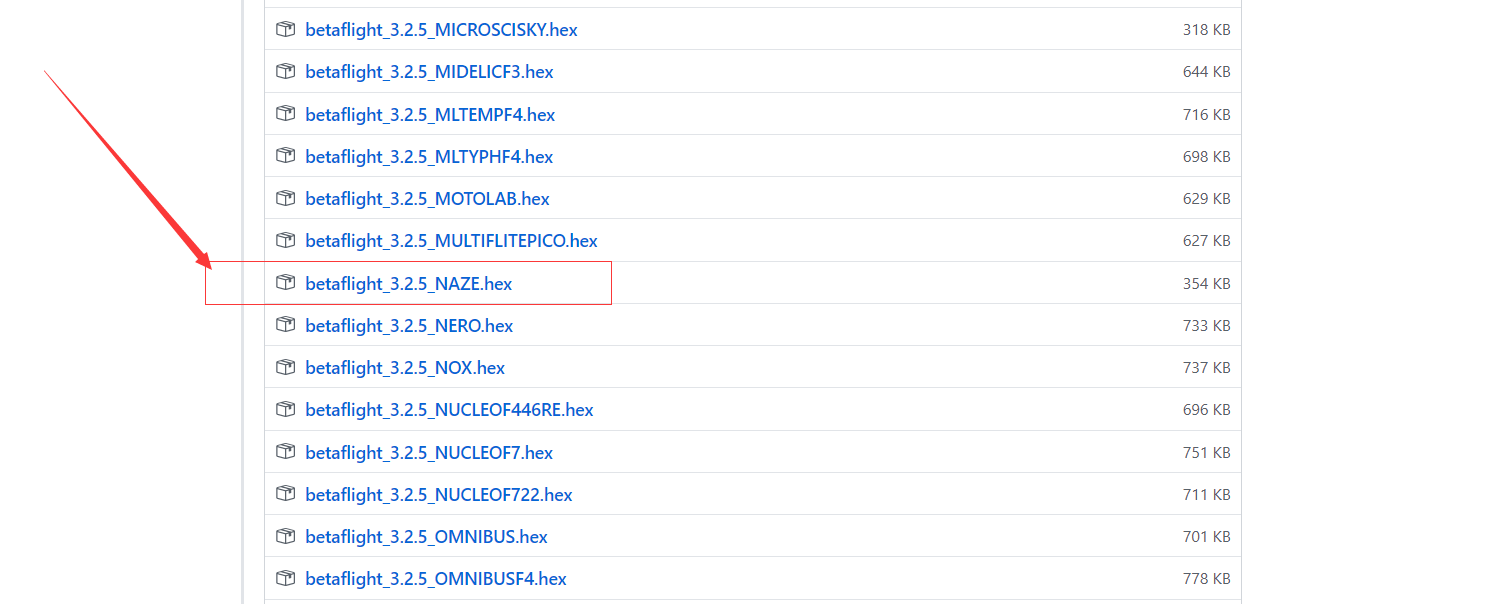
下载Betaflight_NAZE固件:Release Betaflight 3.2.5 · betaflight/betaflight · GitHub
笔者也将文件上传到百度网盘了
链接:https://pan.baidu.com/s/1tEI8hrCcxtwFa4gWNcR5PQ
提取码:71cn
打开Betaflight Configurator调参软件(可移步百度网盘下载);
链接:https://pan.baidu.com/s/1tEI8hrCcxtwFa4gWNcR5PQ
提取码:71cn
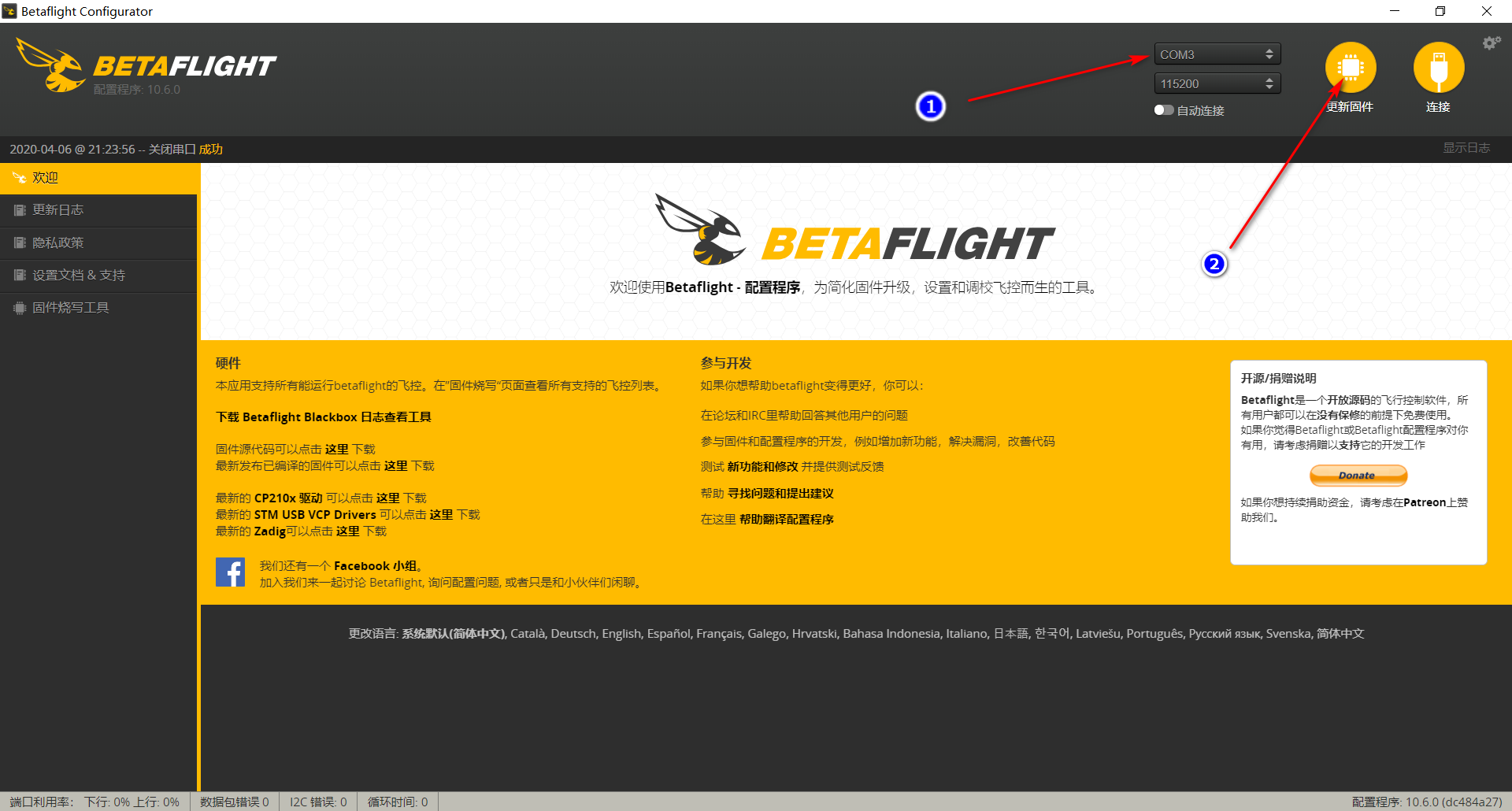
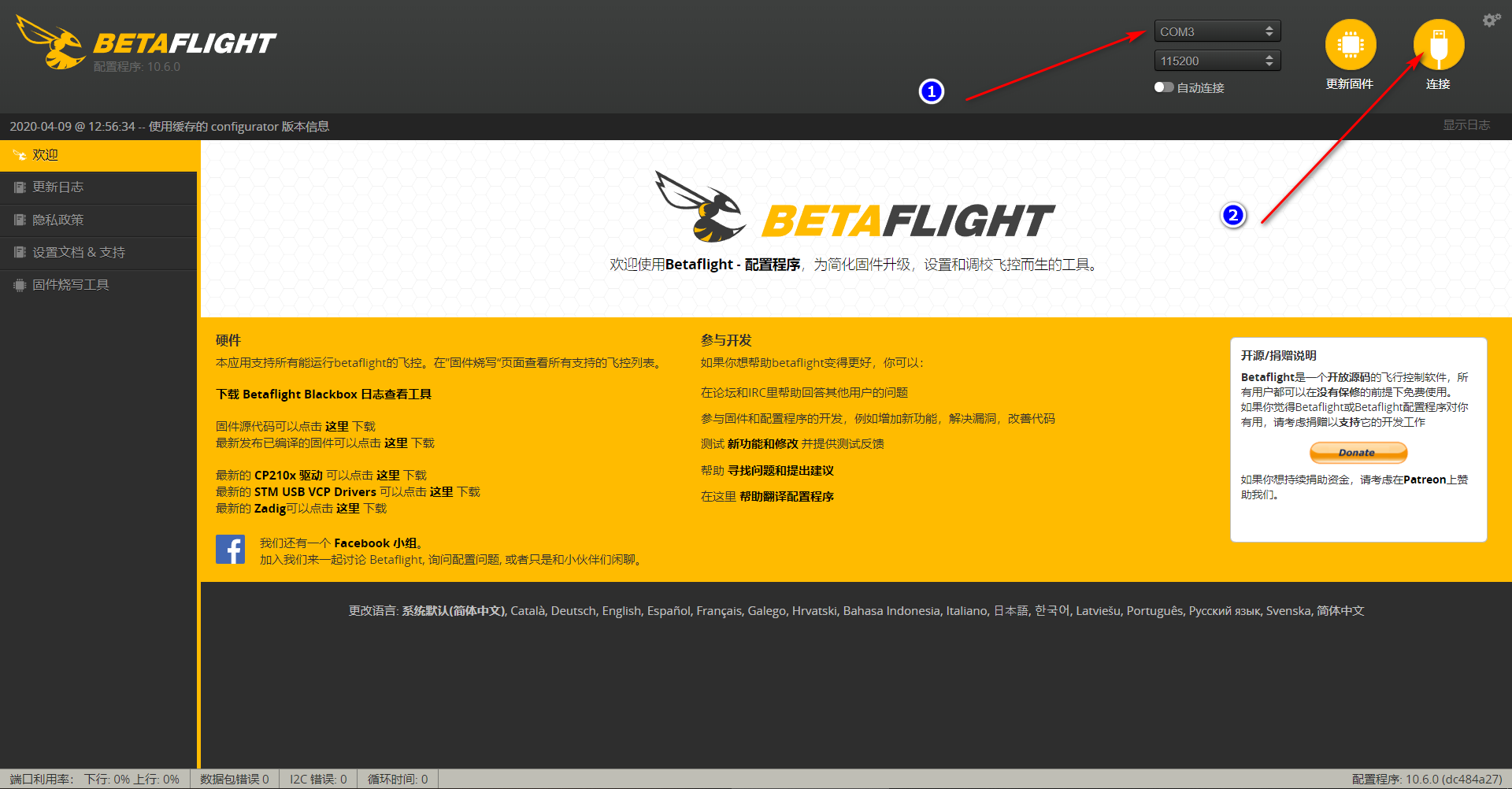
选择串口下载器对应的COM口,点击更新固件;
如果你的电脑无法识别串口,需要安装CH340驱动,商家会赠资料,或者找网上教程。
打开无重启序列选项 (因为我们已经设置为Bootloader模式了),点击从本地电脑加载固件,选择刚才下载的hex文件;
 点击烧写固件;
点击烧写固件;

开始烧写;
 烧写成功!再点一次更新固件退出这个页面。
烧写成功!再点一次更新固件退出这个页面。

这个时候要把boot0引脚帽更换一下了,接法如下:
b0–>b-
b1–>b-
蓝色板接线如下图:
进入下一步设置betaflight参数。
4.软件调试
打开Betaflight Configurator调参软件,选择串口下载器对应的COM口,点击连接;
将四轴水平放置,在设置界面里点击 校准加速度计,这时可以上下左右翻转四轴,康康加速度计和图中显示是否一样;
 端口界面,打开UART2串行数字接收机,因为我们要用其作为SBUS接收机输入(若用PPM接收机也要打开,但PWM接收机就不用打开了);
端口界面,打开UART2串行数字接收机,因为我们要用其作为SBUS接收机输入(若用PPM接收机也要打开,但PWM接收机就不用打开了);
配置界面里,混控模型选择默认即可,也可根据自己的电机布置选择其他类型,只要符合自己四轴的转向;
电调协议为BRUSHED,用来驱动空心杯;
打开MOTOR_STOP,防止启动时发生意外;

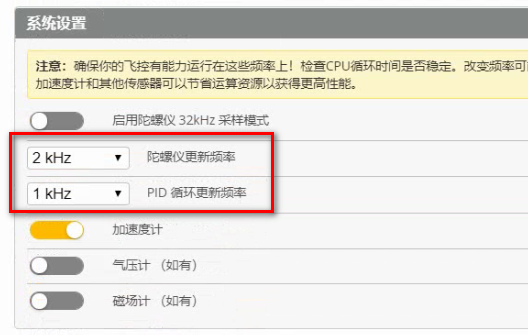
陀螺仪更新频率不能超过2kHz;
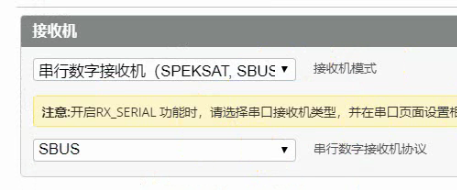
接收机选择串行数字接收机,协议选择SBUS;
动力&电池界面,我们没有在飞控板上焊接测电压电路,选择无电压计;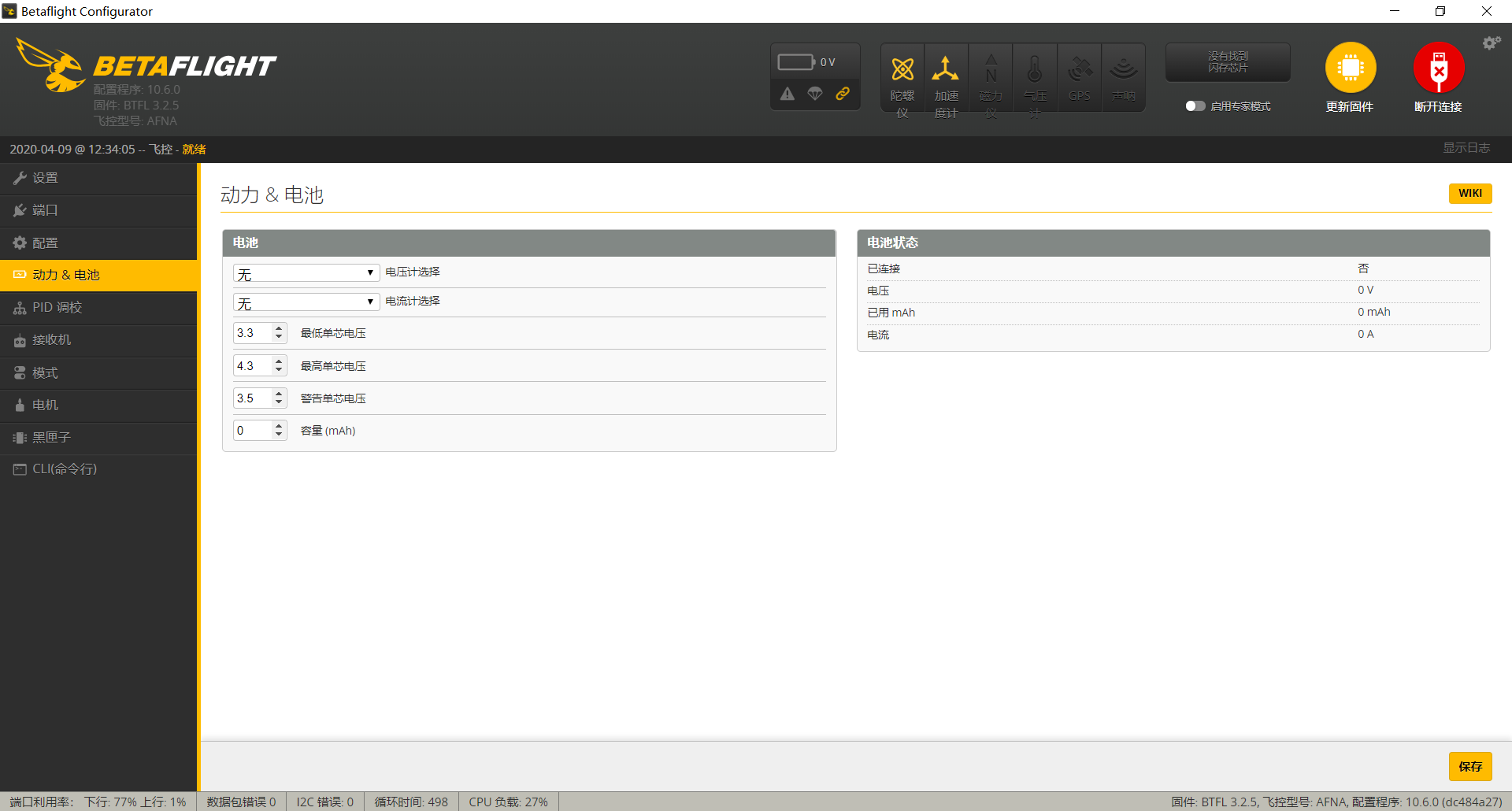
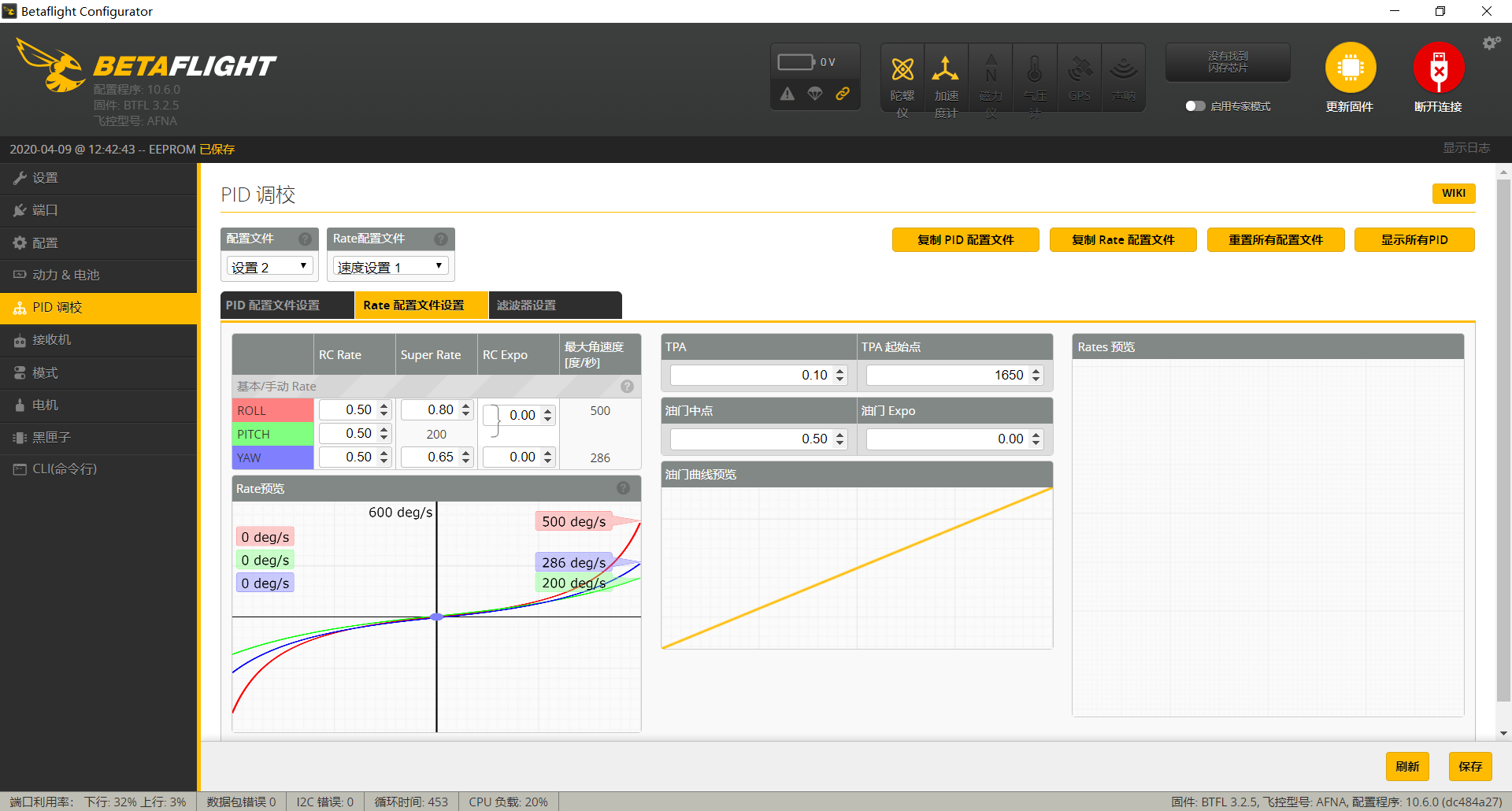
默认的PID参数不稳定,笔者经过试飞,调试好的PID参数如下:

Rate参数可以根据自己的情况调节,deg/s越大,摇杆的角度反馈越大(飞行时摇杆拨动一点,飞机就会倾转很大角度);
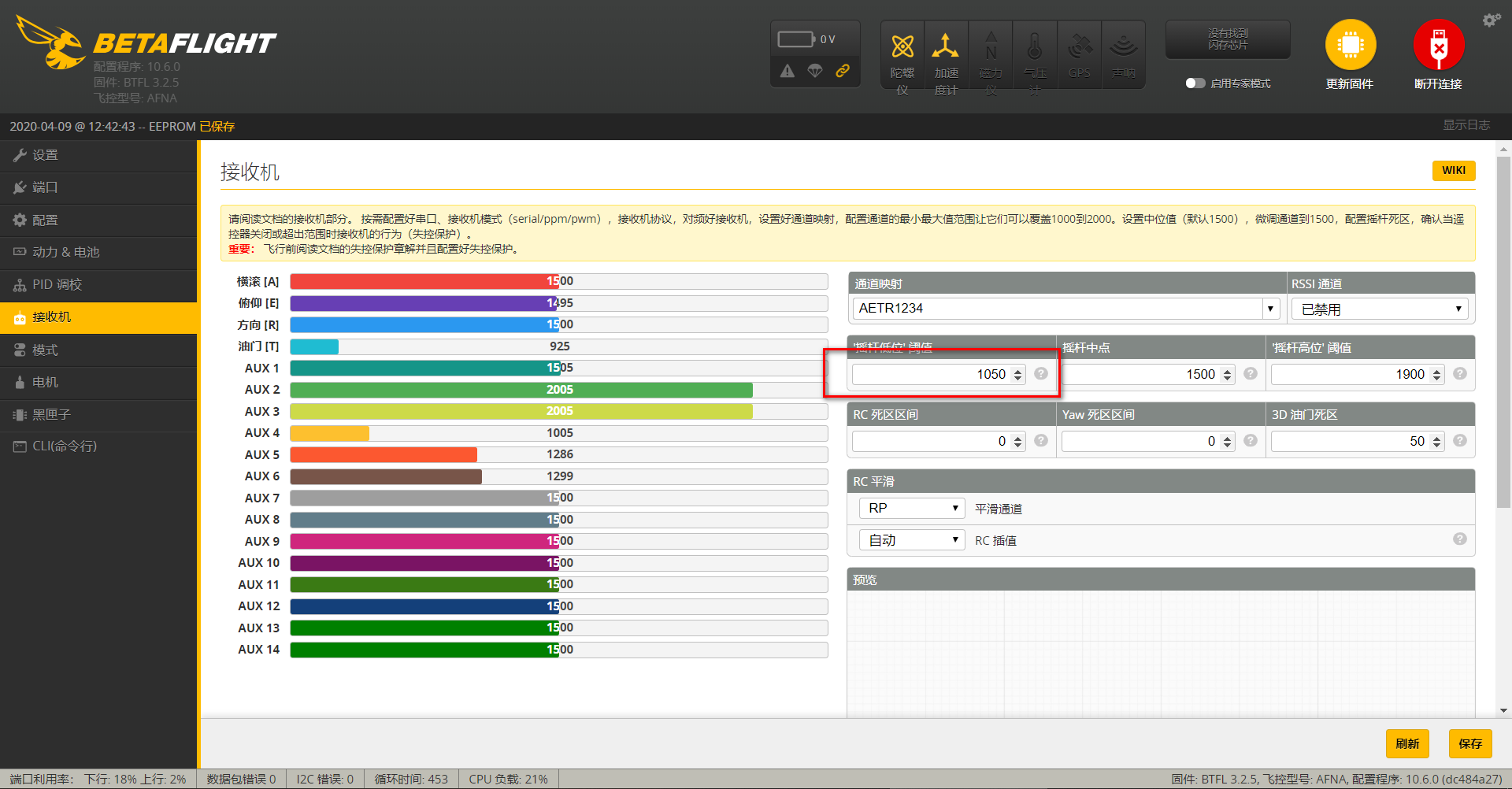
 用杜邦线连接SBUS接收机,打开遥控器拨动摇杆,可以看到软件中对应通道变化,大小变化不一致时需要调节遥控器的通道正反。摇杆低位阈值要设置的比油门最小值大一些,否则无法解锁;
用杜邦线连接SBUS接收机,打开遥控器拨动摇杆,可以看到软件中对应通道变化,大小变化不一致时需要调节遥控器的通道正反。摇杆低位阈值要设置的比油门最小值大一些,否则无法解锁;
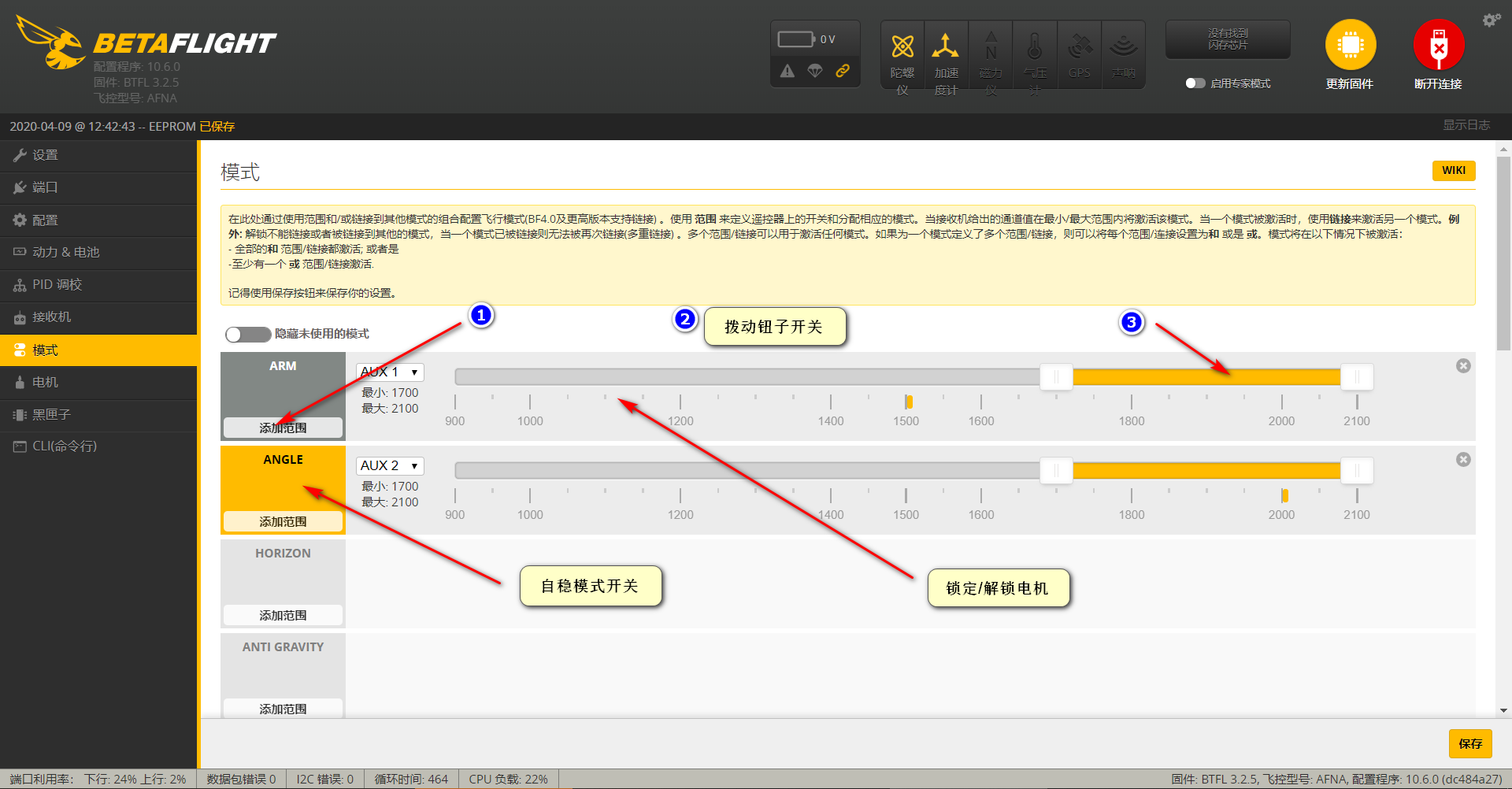
设置解锁通道和自稳开关,对于新手来说一定要打开自稳开关,否则飞机很难控制;
点击 添加范围,拨动遥控器上的任何一个扭子开关,可以看到软件中的标志位变化,拖动滑块至对应的开关区域即可;
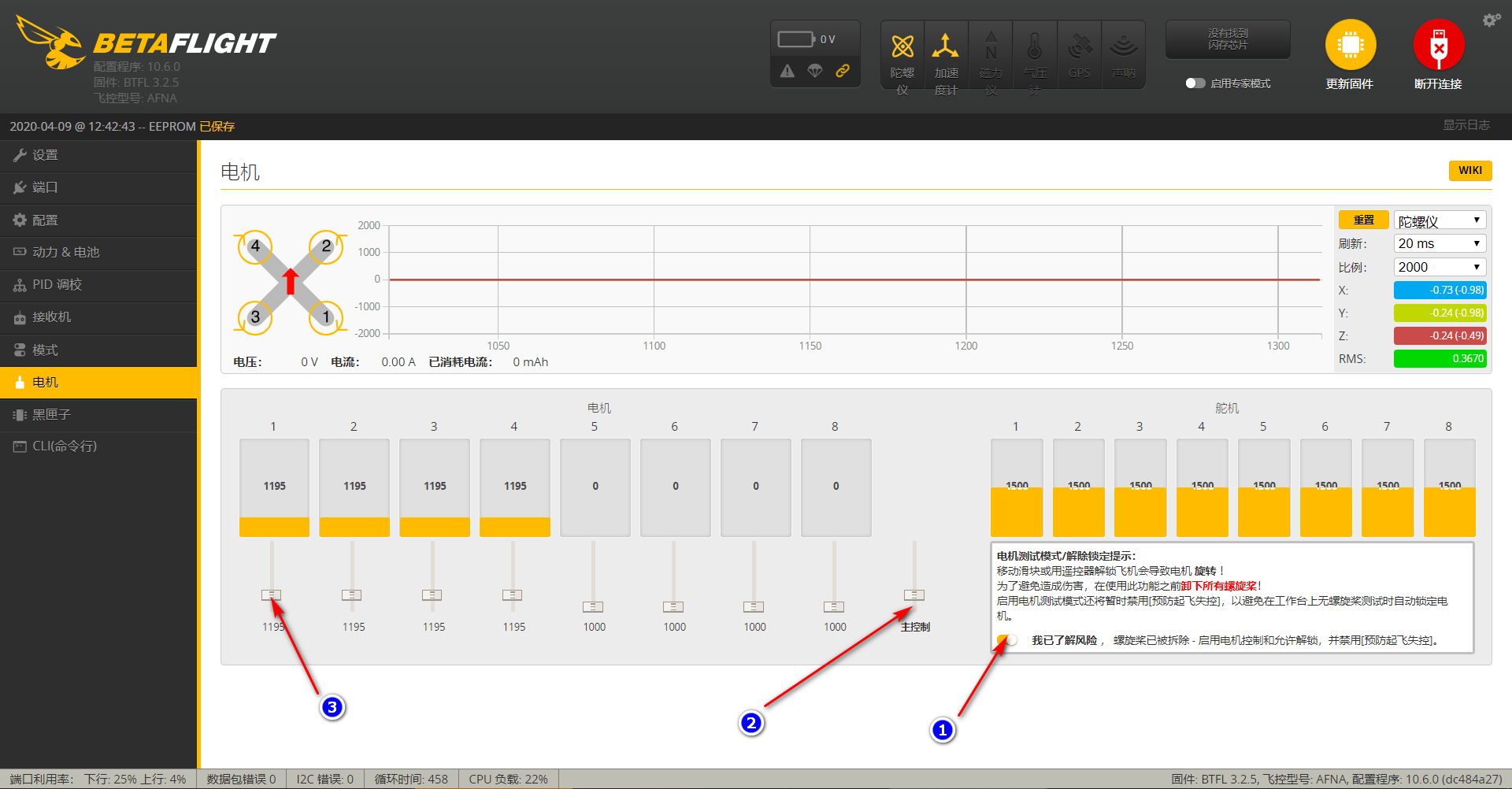
不装螺旋桨的情况下,打开我已了解风险,上电拖动滑块,对应通道的电机即可旋转。用手轻触电机侧面,判断电机转向是否与软件中相同;
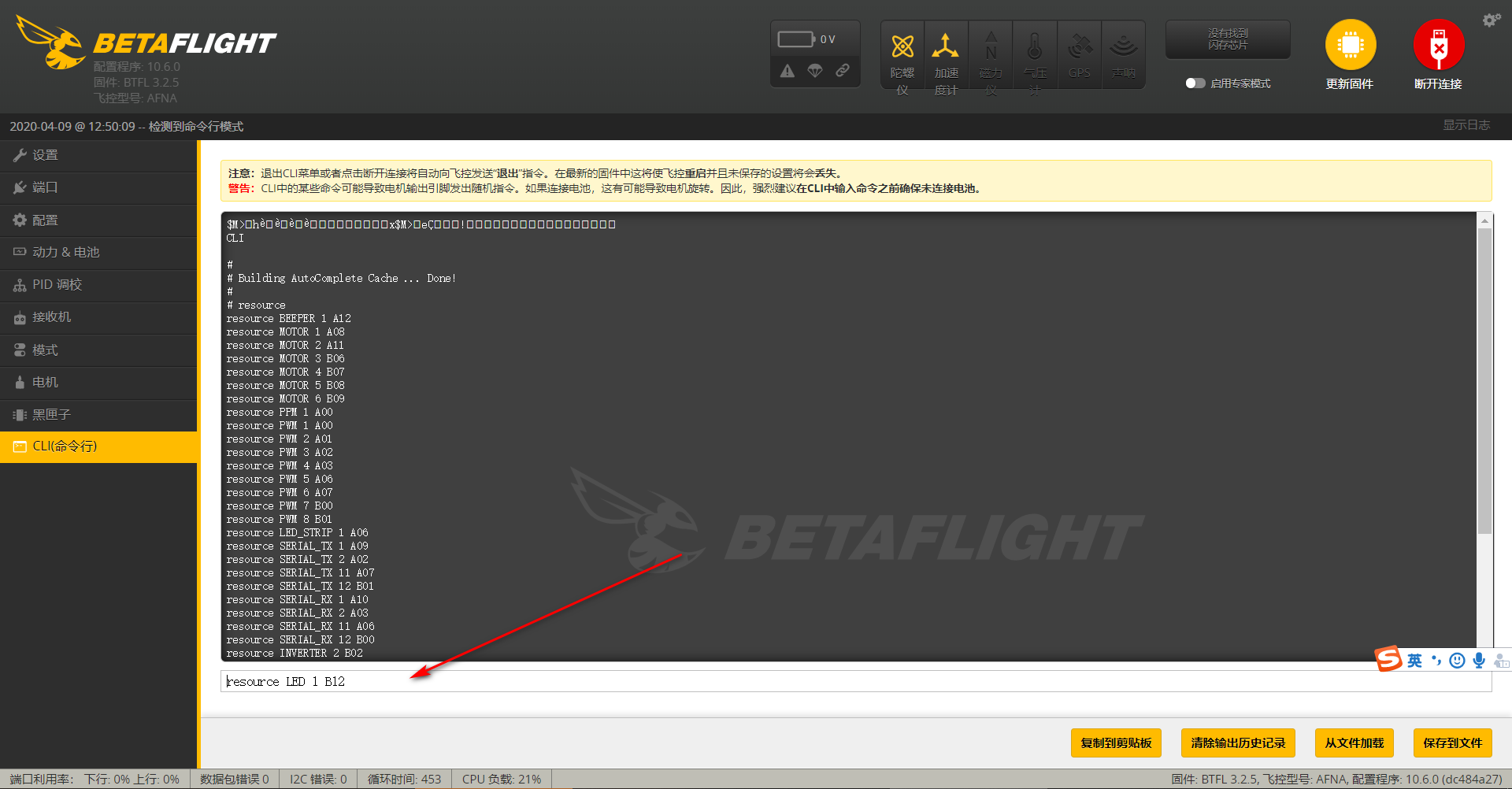
CLI命令行里面,可以设置命令设置、查看飞控参数 ,比如输入resource回车会显示所有引脚使用情况;输入set回车会显示参数设置;get beeper回车会显示所有与beeper相关的命令,更多可以参考GitHub – betaflight/betaflight: Open Source Flight Controller Firmware;
这里我们把led 1引脚改一下,因为STM32F103C8T6黑色开发板上已经提供了一个led位于PB12,蓝色板改为PC13;
resource LED 1 B12输入以上命令,回车,再输入save回车保存设置;
 所有设置已经完成了,现在可以装桨试飞啦~~~
所有设置已经完成了,现在可以装桨试飞啦~~~
5.试飞效果
飞行视频已上传B站
[DIY] 制作有刷四轴飞控刷Betaflight固件,改造空心杯小四轴
试飞时最好找块松软的草地,一定要打开自稳模式!
相关资料下载
链接:https://pan.baidu.com/s/1tEI8hrCcxtwFa4gWNcR5PQ
提取码:71cn
参考链接
https://www.jianshu.com/p/e5c6d30dec51
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/191427.html原文链接:https://javaforall.net


