
大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE使用 1年只要46元 售后保障 童叟无欺
缺陷的分类
严重程度:严重一般、次要、轻微、
优先级:立即解决、高级优先、正常排队、低优先级
种类:界面、功能、安全、兼容、性能
阶段:需求、架构、设计、编码、测试
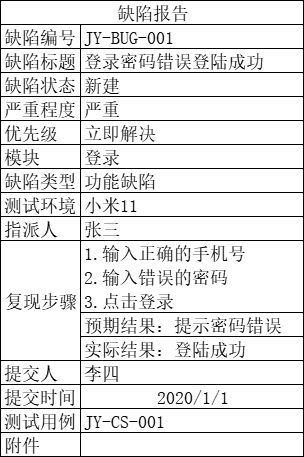
缺陷报告核心要素(8):缺陷编号、缺陷标题、缺陷状态、重现步骤、严重程度、优先级、缺陷类型、测试环境

缺陷八种状态:新建、指派、打开、修复、拒绝、延期、关闭、重新打开。

版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请联系我们举报,一经查实,本站将立刻删除。
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/192393.html原文链接:https://javaforall.net


