
大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE使用 1年只要46元 售后保障 童叟无欺
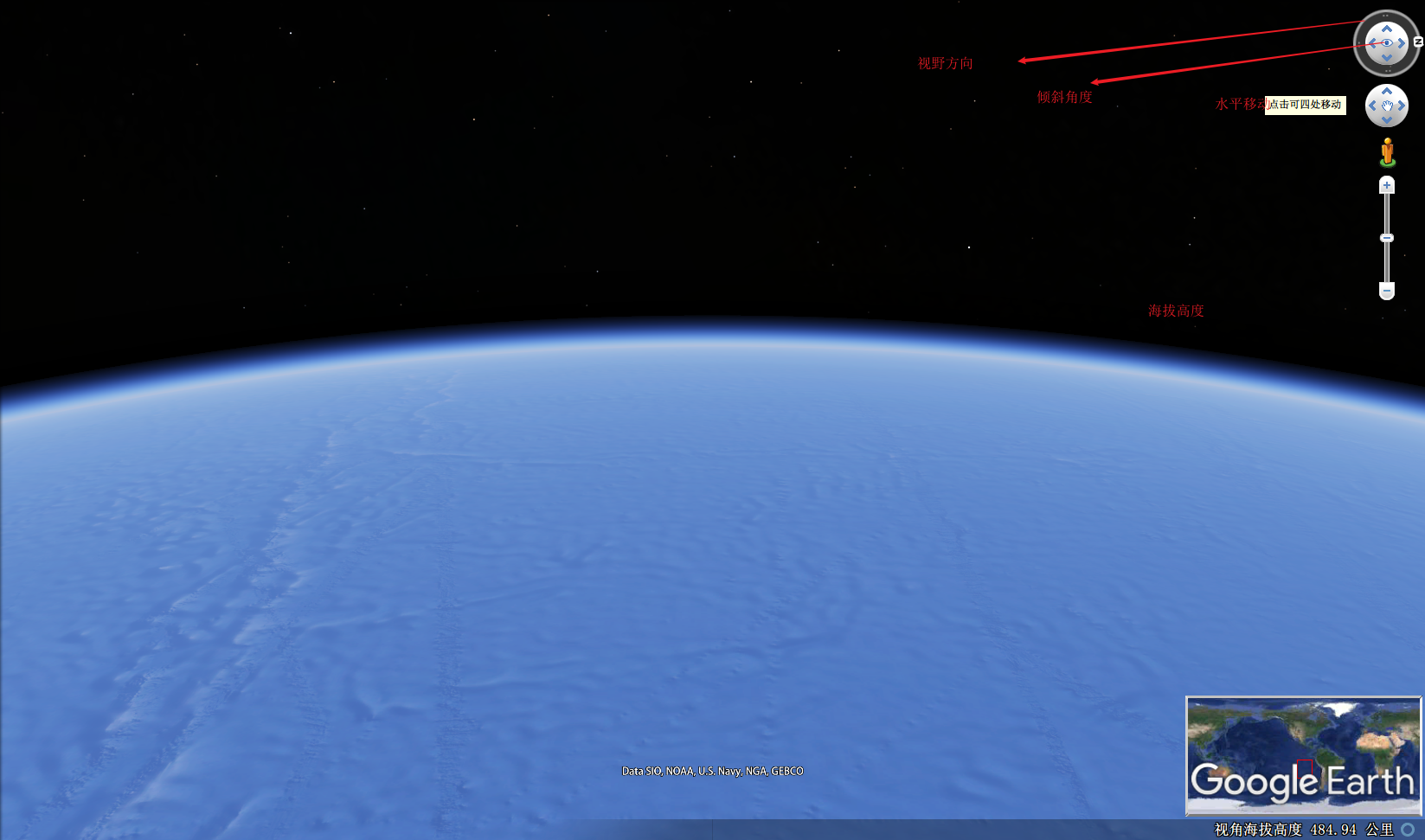
在 Google 地球中使用键盘/鼠标导航
首先要明白导航过程中的三个中心,视野中心,相机视角,鼠标锁定位置。
还要明白3D视图和俯视图、地平面视图的区别,因为在海拔为0时将进入地平面视图,上下的操作将变为拉近和推远。
中间的位置为视野中心,可以通过Ctrl+Shif+左箭头/右箭头来触发显示,如果要展示的对象不在视野中心,可以通过Alt+左箭头/右箭头进行对象位置微调。-/+的中心为视野中心。
相机视角可以通过Ctrl触发,为可以通过左箭头/右箭头控制水平方向旋转,上箭头/下箭头控制上下方向旋转。摄像机高度可以通过-/+来调整,右下角有视角海拔高度指示。
鼠标锁定位置中心可以通过Shift触发。也可以用中间滚轮和右键触发。


提示:要减慢移动速度,请按住 Alt 并同时使用键盘快捷键。
| 操作 | 快捷键(Windows 和 Linux) | 快捷键 (Mac) |
|---|---|---|
| 平移 |
在俯瞰视角,点击左键并移动 在地平面视图,点击左键上下移动为拉近和推远、左右移动为移动 |
|
| 向左移动 | 向左箭头 | 向左箭头 |
| 向右移动 | 向右箭头 | 向右箭头 |
| 向上移动 | 向上箭头 | 向上箭头 |
| 向下移动 | 向下箭头 | 向下箭头 |
| Ctrl与Shift的区别是圆心不同,Shift是以鼠标锁定位置为中心,Ctrl是以相机视角为中心。配合鼠标使用也是同样的。 | ||
| 查看第三视角(鼠标锁定位置) | 按住 Shift,然后点击并拖动 | 屏幕会显示中心,且鼠标变为上下箭头 |
| 查看第一视角(相机视角) | 按住 Ctrl,然后点击并拖动 | 鼠标会变为十字 |
| 顺时针旋转(鼠标锁定位置) | Shift + 向左箭头 | Shift + 向左箭头 |
| 逆时针旋转(鼠标锁定位置) | Shift + 向右箭头 | Shift + 向右箭头 |
| 向上倾斜(鼠标锁定位置) | 按住 Shift,然后点击并向下拖动 | Shift + 向下箭头 |
| 向下倾斜(鼠标锁定位置) |
Shift + 向上箭头 按住 Shift,然后点击并向上拖动 |
Shift + 向上箭头 |
| 顺时针旋转(相机视角) | Ctrl + 向左箭头 | Ctrl + 向左箭头 |
| 逆时针旋转(相机视角) | Ctrl + 向右箭头 | Ctrl + 向右箭头 |
| 向上倾斜(相机视角) | 按住 Ctrl,然后点击并向下拖动 | Ctrl + 向下箭头 |
| 向下倾斜(相机视角) |
Ctrl + 向上箭头 按住 Ctrl,然后点击并向上拖动 |
Ctrl + 向上箭头 |
| 鼠标左键 | ||
| 平移 |
在3D视图和俯视图,点击左键 |
|
| 以鼠标锁定位置为中心自由观察 | 在3D视图和俯视图、地平面视图,点击左键,拖拽 | Shift+左键 |
| 以相机视角为中心自由观察 | 在3D视图和俯视图、地平面视图,点击左键,拖拽 | Ctrl+左键 |
| 拉近/推远 | 在地平面视图,点击左键上下移动 | |
| 放大 | 双击左键 | |
| 鼠标滚轮中键和键盘放大缩小的区别,鼠标滚轮会以当前鼠标左键位置为中心,键盘会以屏幕中心为中心。 | ||
| 缩放(鼠标锁定位置) | 中键滚动 | |
| 以鼠标锁定位置为中心自由观察 | 按住中键拖动 | 比左键配合Shift更方便。 |
| 放大(视野中心) | + | + |
| 缩小(视野中心) | – | – |
| 鼠标右键(无论按住Ctrl,Shift都是以鼠标锁定位置为中心) | ||
| 旋转 | 点击右键并向左或向右拖动 | |
| 缩放 | 点击右键并向上或向下拖动 | |
| 缩放 | 双击右键 | |
| PLUS CODE码 | 点击右键 | 按住Shift,点击右键 |
| 可以随时停止过渡动画 | ||
| 停止当前运动 | 空格键 | 空格键 |
| 将视图重置为上北下南 | n | n |
| 将倾斜度重置为“鸟瞰”视图 | u | u |
| 将地球置于中央 | r | r |
| 显示/隐藏总览窗口 | Ctrl + m | ⌥⇧⌘ + m |
| 显示/隐藏网格 | Ctrl + l | |
| 进入飞行模拟器 | Ctrl + Alt + A | |
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请联系我们举报,一经查实,本站将立刻删除。
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/193739.html原文链接:https://javaforall.net


