
大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE使用 1年只要46元 售后保障 童叟无欺
转自:http://www.itsiwei.com/21962.html
在上一次分享中,我介绍了毫米波雷达的原理、数据特性及优缺点。毫米波雷达的低环境敏感和低成本的特性使得其在ADAS和自动驾驶领域得到了广泛的应用。
今天要介绍的是一款极其常见的传感器——超声波雷达。如果你觉得超声波雷达有些陌生,那么它还有一个更通俗的名字——倒车雷达。
在倒车入库,慢慢挪动车子的过程中,在驾驶室内能听到”滴滴滴“的声音,这些声音就是根据超声波雷达的检测距离给司机的反馈信息。
车载的超声波雷达一般安装在汽车的保险杠上方,隐藏在保险杠的某个位置。在车上外观如下图黄色箭头处的圆点所示。


超声波雷达未安装时的模样如下:

图片出处:https://www.aliexpress.com/item/New-Parking-Sensor-Car-Reverse-Back-Up-Ultrasonic-Radar-G0448-P/32382592684.html
正文
超声波雷达的类型
常见的超声波雷达有两种。第一种是安装在汽车前后保险杠上的,也就是用于测量汽车前后障碍物的倒车雷达,这种雷达业内称为UPA;第二种是安装在汽车侧面的,用于测量侧方障碍物距离的超声波雷达,业内称为APA。
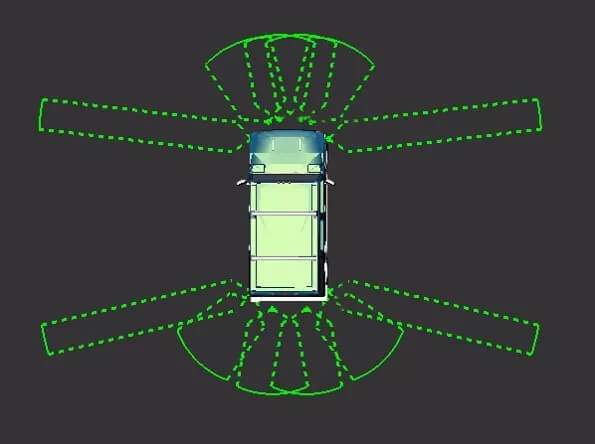
UPA和APA的探测范围和探测区域都太相同,如下图所示。图中的汽车配备了前后向共8个UPA,左右侧共4个APA。
UPA超声波雷达
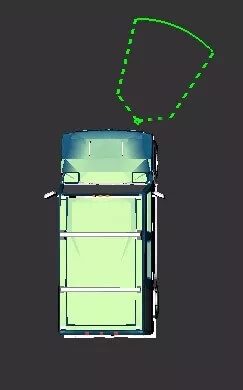
UPA超声波雷达的探测距离一般在15~250cm之间,主要用于测量汽车前后方的障碍物。
如图所示,为单个UPA的探测范围示意图。
APA超声波雷达
APA超声波雷达的探测距离一般在30~500cm之间。APA的探测范围更远,因此相比于UPA成本更高,功率也更大。
如图为单个APA的探测范围示意图。
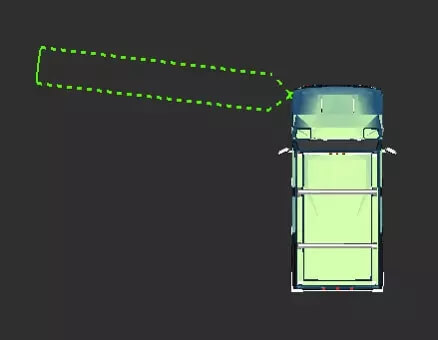
APA的探测距离优势让它不仅能够检测左右侧的障碍物,而且还能根据超声波雷达返回的数据判断停车库位是否存在。
超声波雷达的数学模型
虽然UPA和APA无论在探测距离还是探测形状上区别很大,但是它们依然可以用同样的数学模型描述,描述一个超声波雷达的状态需要如下四个参数,其数学模型的示意图如下。
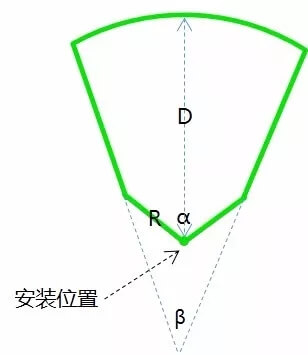
参数1:α
α是超声波雷达的探测角,一般UPA的探测角为120°左右,APA的探测角比UPA小,大概为80°。
参数2:β
β是超声波雷达检测宽度范围的影响因素之一,该角度一般较小。UPA的β角为20°左右,APA的β角比较特殊,为0°。
参数3:R
R也是超声波雷达检测宽度范围的影响因素之一,UPA和APA的R值差别不大,都在0.6m左右。
参数4:D
D是超声波雷达的最大量程。UPA的最大量程为2米~2.5米,APA的最大量程至少是5米,目前已有超过7m的APA雷达在业内使用。
超声波雷达的特性
特性一:温度敏感
超声波雷达的测距原理和之前介绍的激光雷达、毫米波雷达类似,距离=传播速度*传播时间/2。不同的是激光雷达和毫米波雷达的波速都为光速,而超声波雷达的波速跟温度有关。近似关系如下:
C = C0 + 0.607 ∗ T,C0为零度时的声波速度332m/s,T为温度(单位:℃)。
例如,温度在0℃时,超声波的传播速度为332m/s;温度在30℃时,超声波的传播速度为350m/s。相同相对位置的障碍物,在不同温度的情况下,测量的距离不同。
对传感器精度要求极高的自动驾驶系统来说,要么选择将超声波雷达的测距进行保守计算;要么将温度信息引入自动驾驶系统,提升测量精度。
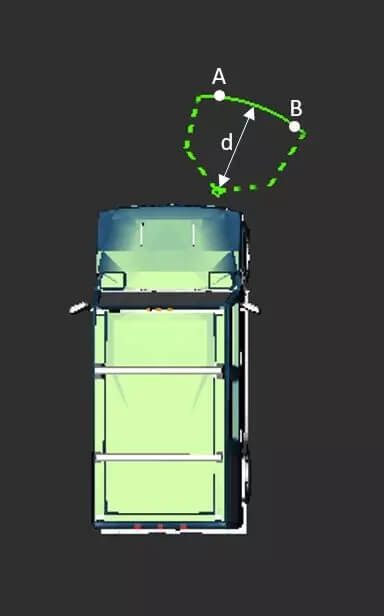
特性二:无法精确描述障碍物位置
超声波雷达在工作时会返回一个探测距离的值,如图所示。处于A处和处于B处的障碍物都会返回相同的探测距离d。所以在仅知道探测距离d的情况下,通过单个雷达的信息是无法确定障碍物是在A处还是在B处的。
超声波雷达的应用
本文标题提到超声波雷达是被低估的传感器,因为它除了检测障碍物外,还可以做很多事。
应用1:泊车库位检测
自动泊车功能需要经历两个阶段:1.识别库位;2.倒车入库
识别库位功能就是依赖安装在车辆侧方的APA,如下场景。
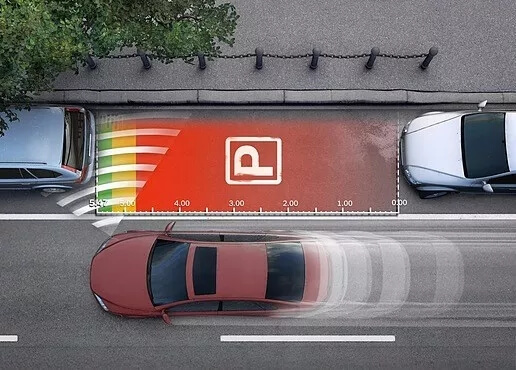
图片出处:http://articles.sae.org/7477/
汽车缓缓驶过库位时,汽车右前方的APA传感器返回的探测距离与时间的关系大致如下图:
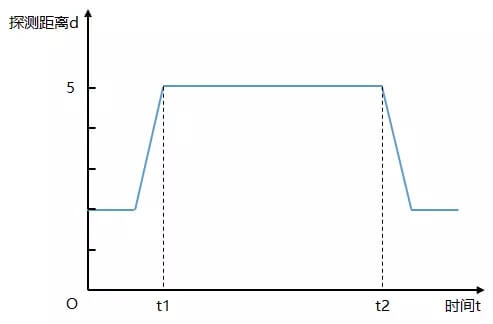
将t1时刻到t2时刻的车速做积分即可得到库位的近似长度,如果近似认为汽车为匀速行驶,直接用车速乘以(t2-t1)即可。当检测的长度超过车辆泊入所需的最短长度时则认为当前空间有车位。
同样后侧向的APA也会生成类似信号曲线,用以做库位的二次验证。
有了库位检测功能,进而开发自主泊车功能就不是难事了。
高速横向辅助
特斯拉Model S在AutoPilot 1.0时代就实现了高速公路的巡航功能,为了增加高速巡航功能的安全性和舒适性,特斯拉将用于泊车的APA超声波雷达,也用在了高速巡航上。
先看一段Model S应用APA的视频,视频左下角的图像是一个朝汽车后向的摄像机,右侧的图像是朝向行驶方向的视角。
在视频中可以看出,当左侧驶过的汽车理自车较近时,Model S在确保右侧有足够空间的情况下,自主地向右微调,降低与左侧车辆的碰撞风险。
小结
以上内容基本能让大家了解超声波雷达的数据及工作方式了。作为无人车上成本最低的传感器,挖掘超声波雷达的潜力是工程师们睡觉都在琢磨的事。
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/194683.html原文链接:https://javaforall.net


