
构建语义地图时,用的是 octomap_server和 semantic_slam: octomap_generator,不过还是整理下之前的学习笔记。
一、Octomap 安装并使用Octomap_Server
1.1 Apt 安装 Octomap 库
如果你不需要修改源码,可以直接安装编译好的 octomap 库,记得把 ROS 版本「kinetic」替换成你用的:
sudo apt-get install ros-kinetic-octomap* 上面这一行命令等价于安装以下的 octomap 组件:
sudo apt-get install ros-kinetic-octomap ros-kinetic-octomap-mapping ros-kinetic-octomap-msgs ros-kinetic-oc 注意:上面没有安装 ros-kinetic-octomap-server,原因是我要使用这个包来建图,并且需要修改它,所以在下一步我直接通过编译源码来安装它!
1.2 编译安装 OctomapServer 建图包
因为我要启用八叉树体素栅格的 RGB 颜色支持,需要修改源码,所以必须使用源码编译安装,过程如下:
创建编译用的工作空间
cd 你的一个目录/ # 创建工作空间 mkdir octomap_ws cd octomap_ws/ # ROS 的工作空间必须包含 src 目录 mkdir src/ # 创建 catkin_make # 记得 source 环境变量 source devel/setup.zsh 下载编译源码
cd src/ git clone https://github.com/OctoMap/octomap_mapping.git 返回你的工作空间主目录,安装下依赖,然后开始编译:
cd ../ rosdep install octomap_mapping catkin_make 编译过程基本没有报错,如果你遇到问题,直接复制错误信息浏览器搜索解决,然后启动测试的 launch:
roslaunch octomap_server octomap_mapping.launch 没问题的话应该可以用 rostopic list 看到一个 octomap_full 的话题:
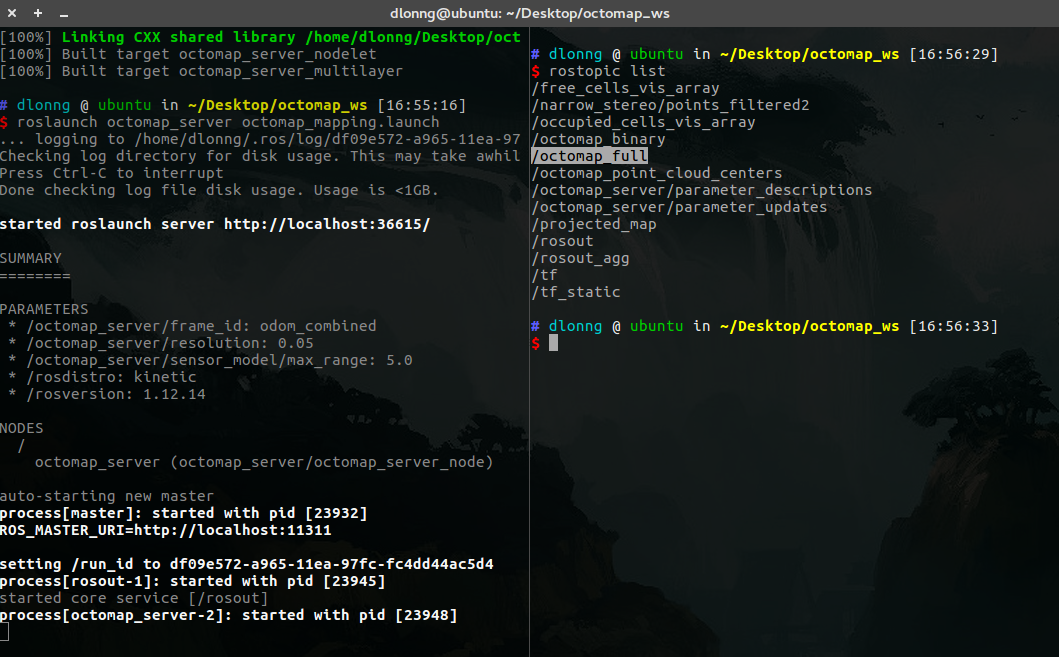

有这个话题说明这个建图包可以正常工作啦:)
1.3 Rviz 可视化 Octomap
ROS 中提供了一个 Rviz 可视化 Octomap 的插件,如果没有安装使用下面的命令即可:
sudo apt-get install ros-kinetic-octomap-rviz-plugins 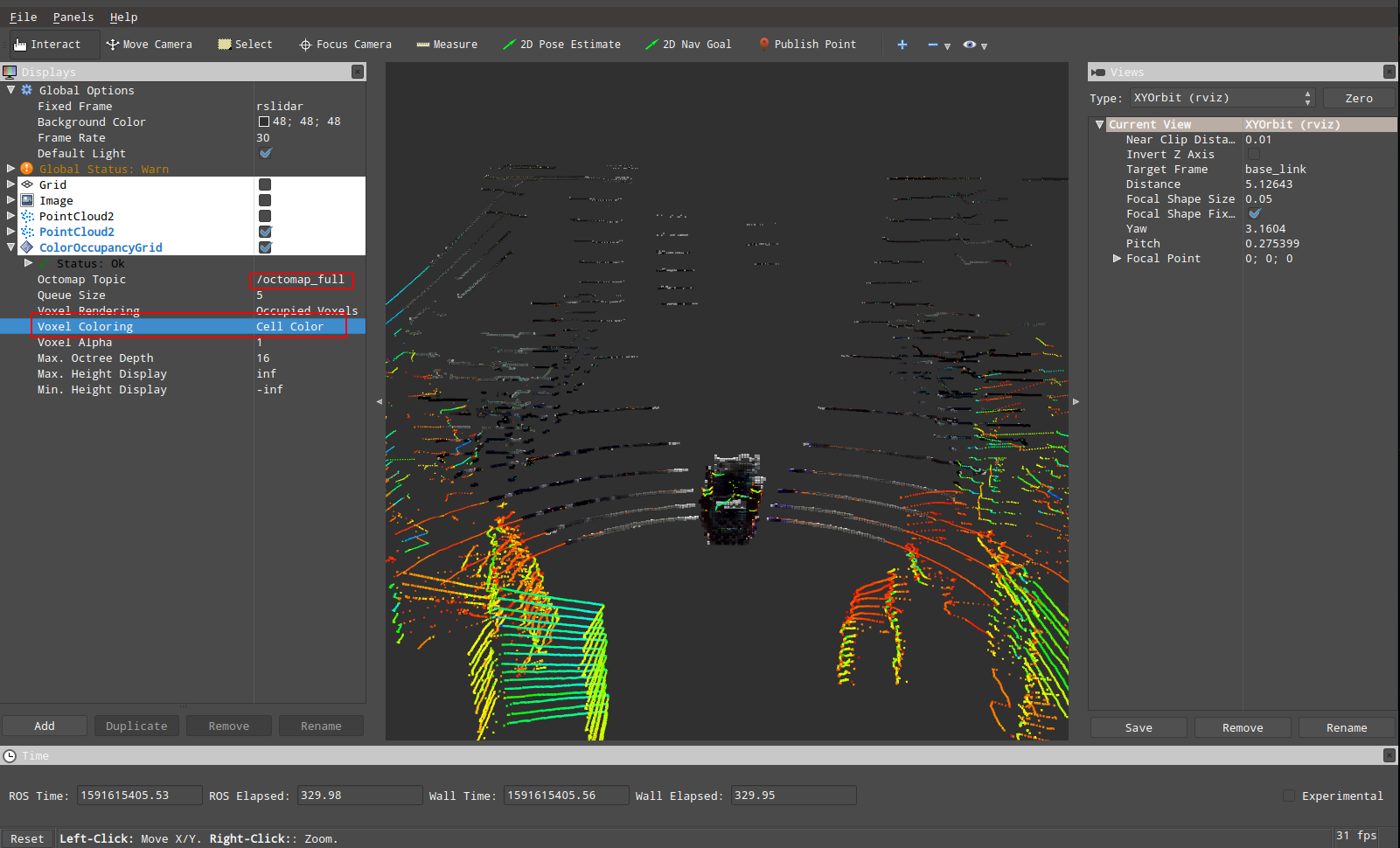
我把点云和体素栅格一起显示了,所以会重叠。这里要注意的是,如果你的点云显示不出来,要检查下「Global Options」的「Fixed Frame」有没有设置正确,我是设置的是 Robosense 雷达的 frame_id:「rslidar」。
1.4 启用 ColorOctomap
默认编译的 octomap 不能显示颜色,要开启颜色的支持,需要 2 个步骤,第一步编辑 OctomapServer.h 文件:
vim octomap_mapping/octomap_server/include/octomap_server/OctomapServer.h 打开下面 COLOR_OCTOMAP_SERVER 宏的注释即可:
// switch color here - easier maintenance, only maintain OctomapServer. // Two targets are defined in the cmake, octomap_server_color and octomap_server. One has this defined, and the other doesn't // 打开这个注释 #define COLOR_OCTOMAP_SERVER 然后重新编译一遍源码:
cd octomap_ws/ catkin_make 第二步是在使用时,在 launch 文件中禁用 height_map,启用 colored_map,这个配置是我阅读源码查找的,因为官网文档很久没有更新了,一些参数配置方法需要通过阅读源码才能知道:
<param name = "height_map" value = "false" /> <param name = "colored_map" value = "true" /> 比如以下是我实验用的 launch 文件:
<launch> <node pkg="octomap_server" type="octomap_server_node" name="octomap_server">
<param name="resolution" value="0.10" />
<param name="frame_id" type="string" value="world" /> <param name = "height_map" value = "false" /> <param name = "colored_map" value = "true" />
<remap from="/cloud_in" to="/fusion_cloud" />
node>
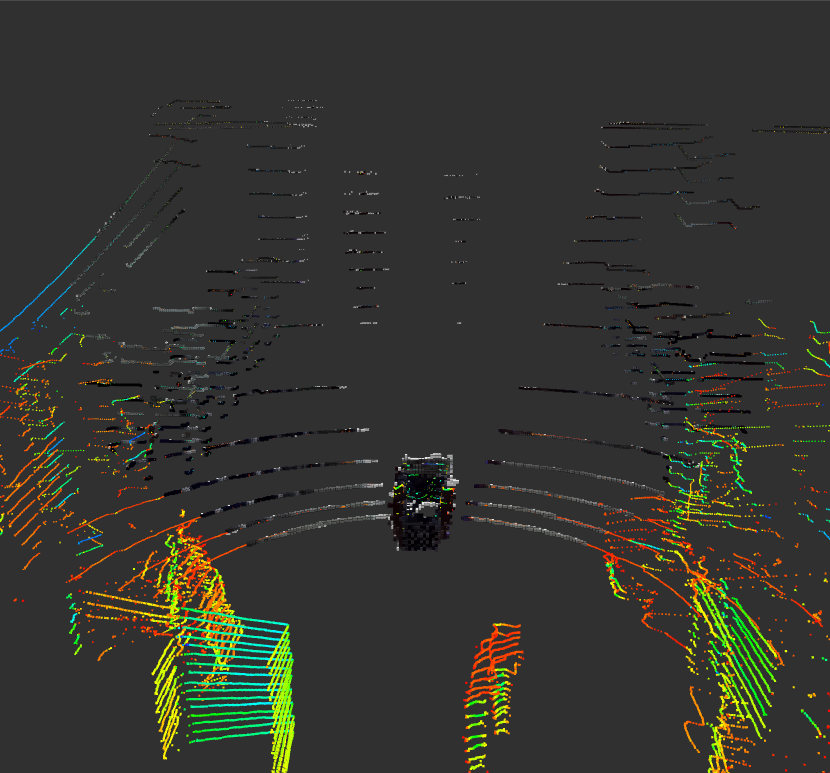
launch> 我设置了八叉树帧的 frame 为 rslidar,并将融合的点云话题 /fusion_cloud 作为节点的输入,我没有提供 TF,因为目前只是做了一个单帧的体素栅格构建,效果如下:
二、增量构建八叉树地图步骤
2.1 配置 launch 启动参数
这 3 个参数是建图必备:
- 地图分辨率
resolution:用来初始化地图对象 - 全局坐标系
frame_id:构建的全局地图的坐标系 - 输入点云话题
cloud_in:作为建图的数据输入,建图包是把一帧一帧的点云叠加到全局坐标系实现建图
<launch> <node pkg="octomap_server" type="octomap_server_node" name="octomap_server">
<param name="resolution" value="0.10" />
<param name="frame_id" type="string" value="map" />
<remap from="/cloud_in" to="/fusion_cloud" />
node>
launch> 以下是所有可以配置的参数:
frame_id(string, default: /map)resolution(float, default: 0.05)height_map(bool, default: true)color/[r/g/b/a](float)sensor_model/max_range(float, default: -1 (unlimited))sensor_model/[hit|miss](float, default: 0.7 / 0.4)sensor_model/[min|max](float, default: 0.12 / 0.97)latch(bool, default: True for a static map, false if no initial map is given)base_frame_id(string, default: base_footprint)filter_ground(bool, default: false)ground_filter/distance(float, default: 0.04)ground_filter/angle(float, default: 0.15)ground_filter/plane_distance(float, default: 0.07)pointcloud_[min|max]_z(float, default: -/+ infinity)occupancy_[min|max]_z(float, default: -/+ infinity)filter_speckles(bool)
2.2 要求 TF 变换
有了全局坐标系和每一帧的点云,但是建图包怎么知道把每一帧点云插入到哪个位置呢?
因为随着机器人的不断移动,会不断产生新的点云帧,每个点云帧在全局坐标系中插入的时候都有一个确定的位置,否则构建的地图就不对了,因此需要给建图包提供一个当前帧点云到全局坐标系的位姿,这样建图包才能根据这个位姿把当前获得的点云插入到正确的位置上。
在 ROS 中可以很方便的使用 TF 来表示这个变换,我们只需要在启动建图包的时候,在系统的 TF 树中提供「cloud frame -> world frame」的变换就可以了:
cloud frame -> world frame (static world frame, changeable with parameter frame_id) 注意:
cloud frame:就是输入点云话题中 head.frame_id,比如 Robosense 雷达的 frame_id = rslidar
world frame:这是全局坐标系的 frame_id,在启动 launch 中需要手动给定,比如我给的是 map
如果你给 world frame id 指定的是输入点云的 frame_id,比如 fusion_cloud.head.frame_id == wolrd_frame_id == rslidar,则只会显示当前帧的八叉树,而不会增量构建地图,这点要注意了,可以自己测试看看。
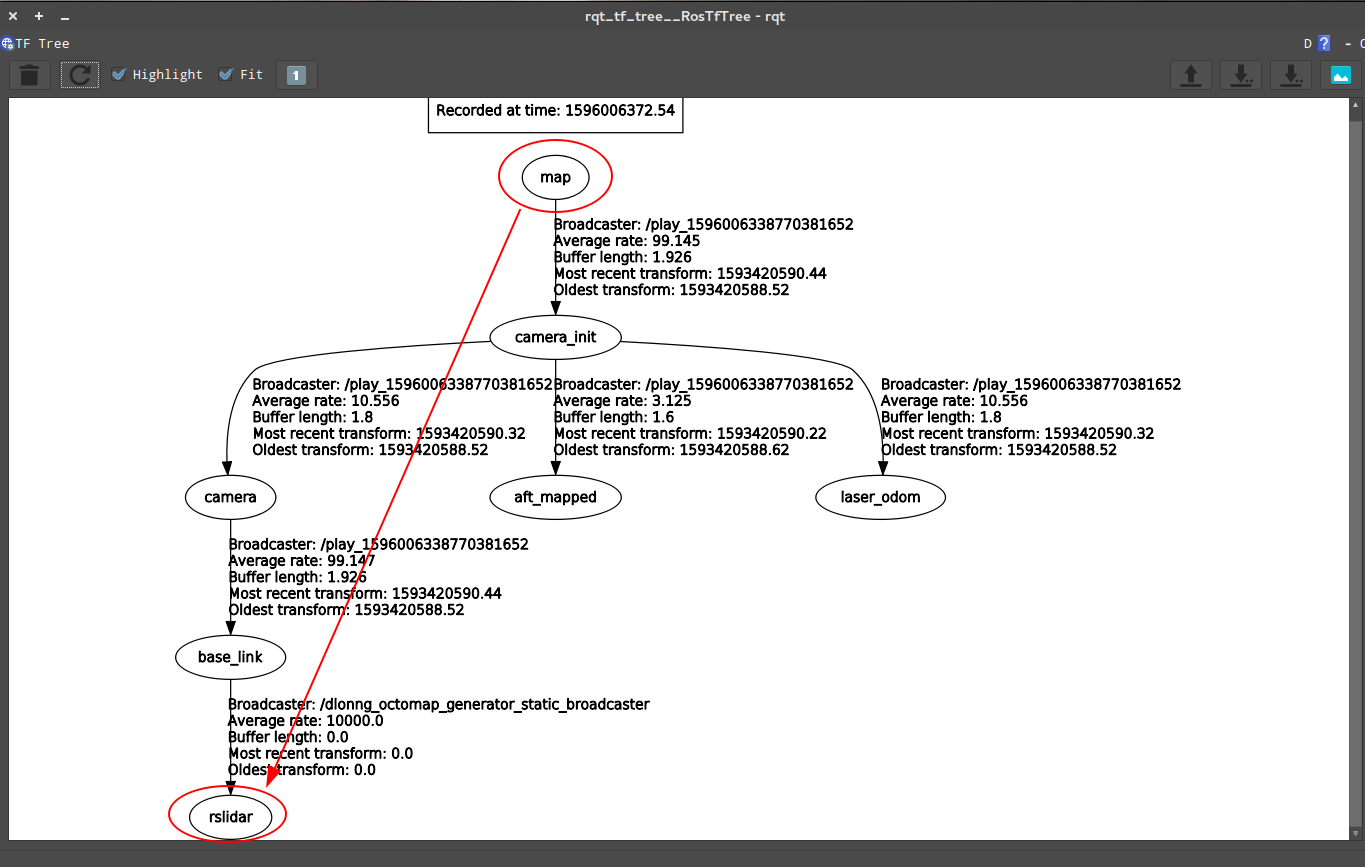
那么为了增量式建图,还需要在系统的 TF 树中提供「rslidar -> world」的变换,这个变换可以通过其他的 SLAM 等获得,比如我测试时候的一个 TF 树如下:
我找了下源代码 OctomapServer.cpp 中寻找 TF 的部分:
tf::StampedTransform sensorToWorldTf; try {
m_tfListener.lookupTransform(m_worldFrameId, cloud->header.frame_id, cloud->header.stamp, sensorToWorldTf); } catch(tf::TransformException& ex){
ROS_ERROR_STREAM( "Transform error of sensor data: " << ex.what() << ", quitting callback"); return; } 总体来说这个建图包使用起来还是挺简单的,最重要的就是要写清楚输入点云话题和 TF 变换。
小 Tips:没有 TF 怎么办?
我刚开始建图的时候,我同学录制的 TF 树中并没有「world -> rslidar」的变换,只有「world -> base_link」,所以为了能够测试增量式建图,因为我的点云帧的 frame_id 是 rslidar,因此我就手动发布了一个静态的「base_link -> rslidar」的变换:
rosrun tf2_ros static_transform_publisher 0 0 0 0 0 0 base_link rslidar 这样系统中就有「rslidar -> world」的变换了,但是我发的位姿都是 0,所以对建图测试没有影响,为了方便启动,放在 launch 中:
<node pkg = "tf2_ros" type = "static_transform_publisher" name = "dlonng_static_test_broadcaster" args = "0 0 0 0 0 0 base_link rslidar" /> 如果你也遇到这个问题,可以试试发个静态 TF 做做测试,关于静态 TF 详细技术可以参考之前的文章:ROS 机器人技术 – 静态 TF 坐标帧
三、ColorOctomap 启用方法
为了显示 RGB 颜色,我分析了下源码,第一步修改头文件,打开注释切换地图类型:OctomapServer.h
// switch color here - easier maintenance, only maintain OctomapServer. // Two targets are defined in the cmake, octomap_server_color and octomap_server. One has this defined, and the other doesn't // 打开这个注释 #define COLOR_OCTOMAP_SERVER #ifdef COLOR_OCTOMAP_SERVER typedef pcl::PointXYZRGB PCLPoint; typedef pcl::PointCloud<pcl::PointXYZRGB> PCLPointCloud; typedef octomap::ColorOcTree OcTreeT; #else typedef pcl::PointXYZ PCLPoint; typedef pcl::PointCloud<pcl::PointXYZ> PCLPointCloud; typedef octomap::OcTree OcTreeT; #endif CMakeList.txt 文件中有 COLOR_OCTOMAP_SERVER 的编译选项:
target_compile_definitions(${
PROJECT_NAME}_color PUBLIC COLOR_OCTOMAP_SERVER) OctomapServer.cpp 中有 colored_map 的参数:
m_useHeightMap = true; m_useColoredMap = false; m_nh_private.param("height_map", m_useHeightMap, m_useHeightMap); m_nh_private.param("colored_map", m_useColoredMap, m_useColoredMap); 地图默认是按照高度设置颜色,如果要设置为带颜色的地图,就要禁用 HeightMap,并启用 ColoredMap:
if (m_useHeightMap && m_useColoredMap) {
ROS_WARN_STREAM("You enabled both height map and RGB color registration. This is contradictory. Defaulting to height map."); m_useColoredMap = false; } 第二步、需要在 octomap_server 的 launch 文件中禁用 height_map,并启用 colored_map :
<param name="height_map" value="false" /> <param name="colored_map" value="true" /> 2 个核心的八叉树生成函数 insertCloudCallback 和 insertScan 中有对颜色的操作:
#ifdef COLOR_OCTOMAP_SERVER unsigned char* colors = new unsigned char[3]; #endif // NB: Only read and interpret color if it's an occupied node #ifdef COLOR_OCTOMAP_SERVER m_octree->averageNodeColor(it->x, it->y, it->z, /*r=*/it->r, /*g=*/it->g, /*b=*/it->b); #endif 四、保存和显示地图
启动 octomap_server 节点后,可以使用它提供的地图保存服务,保存压缩的二进制存储格式地图:
octomap_saver mapfile.bt 保存一个完整的概率八叉树地图:
octomap_saver -f mapfile.ot 安装八叉树可视化程序 octovis 来查看地图:
sudo apt-get install octovis 安装后重启终端,使用以下命令显示一个八叉树地图:
octovis xxx.ot[bt] 五、源码阅读笔记
同时笔者整理了以下这个建图包的关键流程,只有 2 个关键的函数也不是很复杂。
在这里插入代码片<launch> <node pkg="octomap_server" type="octomap_server_node" name="octomap_server">
<param name = "resolution" value = "0.15" />
<param name = "frame_id" type = "string" value = "camera_init" />
<param name = "sensor_model/max_range" value = "15.0" />
<param name = "height_map" value = "false" /> <param name = "colored_map" value = "true" />
<param name = "outrem_radius" type = "double" value = "1.0" /> <param name = "outrem_neighbors" type = "int" value = "10" />
<param name = "latch" value = "false" />
<remap from = "/cloud_in" to = "/fusion_cloud" />
node>
launch> 六、路径规划
这里给一个链接:https://github.com/Quitino/IndoorMapping,该作者实现了基于ORB-SLAM生成三维密集点云,并使用OctoMap构建室内导航地图。也意味着我们可以在此基础上加入轨迹规划算法实现基于OBR-SLAM的室内规划导航。具体代码可以参照:https://blog.csdn.net/lovely_yoshino/article/details/105272602中的3D-RRT路径规划方法实现。
七:介绍三维A*在栅格地图中的使用
AngeloG 博文中写了三维 A的相关matlab仿真。为了便于在ROS中对A算法进行开发,这里也提供一下之前我学习的A*算法
#include "Astar_searcher.h" using namespace std; using namespace Eigen; void AstarPathFinder::initGridMap(double _resolution, Vector3d global_xyz_l, Vector3d global_xyz_u, int max_x_id, int max_y_id, int max_z_id) {
gl_xl = global_xyz_l(0); gl_yl = global_xyz_l(1); gl_zl = global_xyz_l(2); gl_xu = global_xyz_u(0); gl_yu = global_xyz_u(1); gl_zu = global_xyz_u(2); GLX_SIZE = max_x_id; GLY_SIZE = max_y_id; GLZ_SIZE = max_z_id; GLYZ_SIZE = GLY_SIZE * GLZ_SIZE; GLXYZ_SIZE = GLX_SIZE * GLYZ_SIZE; resolution = _resolution; inv_resolution = 1.0 / _resolution; data = new uint8_t[GLXYZ_SIZE]; memset(data, 0, GLXYZ_SIZE * sizeof(uint8_t)); GridNodeMap = new GridNodePtr **[GLX_SIZE]; for (int i = 0; i < GLX_SIZE; i++) {
GridNodeMap[i] = new GridNodePtr *[GLY_SIZE]; for (int j = 0; j < GLY_SIZE; j++) {
GridNodeMap[i][j] = new GridNodePtr[GLZ_SIZE]; for (int k = 0; k < GLZ_SIZE; k++) {
Vector3i tmpIdx(i, j, k); Vector3d pos = gridIndex2coord(tmpIdx); GridNodeMap[i][j][k] = new GridNode(tmpIdx, pos); } } } } void AstarPathFinder::resetGrid(GridNodePtr ptr) {
ptr->id = 0; ptr->cameFrom = NULL; ptr->gScore = inf; ptr->fScore = inf; } void AstarPathFinder::resetUsedGrids() {
for (int i = 0; i < GLX_SIZE; i++) for (int j = 0; j < GLY_SIZE; j++) for (int k = 0; k < GLZ_SIZE; k++) resetGrid(GridNodeMap[i][j][k]); } void AstarPathFinder::setObs(const double coord_x, const double coord_y, const double coord_z) {
if (coord_x < gl_xl || coord_y < gl_yl || coord_z < gl_zl || coord_x >= gl_xu || coord_y >= gl_yu || coord_z >= gl_zu) return; int idx_x = static_cast<int>((coord_x - gl_xl) * inv_resolution); int idx_y = static_cast<int>((coord_y - gl_yl) * inv_resolution); int idx_z = static_cast<int>((coord_z - gl_zl) * inv_resolution); data[idx_x * GLYZ_SIZE + idx_y * GLZ_SIZE + idx_z] = 1; } vector<Vector3d> AstarPathFinder::getVisitedNodes() {
vector<Vector3d> visited_nodes; for (int i = 0; i < GLX_SIZE; i++) for (int j = 0; j < GLY_SIZE; j++) for (int k = 0; k < GLZ_SIZE; k++) {
// if(GridNodeMap[i][j][k]->id != 0) // visualize all nodes in open and // close list if (GridNodeMap[i][j][k]->id == -1) // visualize nodes in close list only visited_nodes.push_back(GridNodeMap[i][j][k]->coord); } ROS_WARN("visited_nodes size : %d", visited_nodes.size()); return visited_nodes; } Vector3d AstarPathFinder::gridIndex2coord(const Vector3i &index) {
Vector3d pt; pt(0) = ((double)index(0) + 0.5) * resolution + gl_xl; pt(1) = ((double)index(1) + 0.5) * resolution + gl_yl; pt(2) = ((double)index(2) + 0.5) * resolution + gl_zl; return pt; } Vector3i AstarPathFinder::coord2gridIndex(const Vector3d &pt) {
Vector3i idx; idx << min(max(int((pt(0) - gl_xl) * inv_resolution), 0), GLX_SIZE - 1), min(max(int((pt(1) - gl_yl) * inv_resolution), 0), GLY_SIZE - 1), min(max(int((pt(2) - gl_zl) * inv_resolution), 0), GLZ_SIZE - 1); return idx; } Eigen::Vector3d AstarPathFinder::coordRounding(const Eigen::Vector3d &coord) {
return gridIndex2coord(coord2gridIndex(coord)); } inline bool AstarPathFinder::isOccupied(const Eigen::Vector3i &index) const {
return isOccupied(index(0), index(1), index(2)); } inline bool AstarPathFinder::isFree(const Eigen::Vector3i &index) const {
return isFree(index(0), index(1), index(2)); } inline bool AstarPathFinder::isOccupied(const int &idx_x, const int &idx_y, const int &idx_z) const {
return (idx_x >= 0 && idx_x < GLX_SIZE && idx_y >= 0 && idx_y < GLY_SIZE && idx_z >= 0 && idx_z < GLZ_SIZE && (data[idx_x * GLYZ_SIZE + idx_y * GLZ_SIZE + idx_z] == 1)); } inline bool AstarPathFinder::isFree(const int &idx_x, const int &idx_y, const int &idx_z) const {
return (idx_x >= 0 && idx_x < GLX_SIZE && idx_y >= 0 && idx_y < GLY_SIZE && idx_z >= 0 && idx_z < GLZ_SIZE && (data[idx_x * GLYZ_SIZE + idx_y * GLZ_SIZE + idx_z] < 1)); } inline void AstarPathFinder::AstarGetSucc(GridNodePtr currentPtr, vector<GridNodePtr> &neighborPtrSets, vector<double> &edgeCostSets) {
neighborPtrSets.clear(); edgeCostSets.clear(); /* STEP 4: finish AstarPathFinder::AstarGetSucc yourself please write your code below */ // get all neighbours of current node, calculate all the costs, and then save to the point. // should be a 3D search, maxumin 26 nodes, but need to remove the obstacles and boundary Vector3i neighborIdx; for (int dx = -1; dx < 2; dx++) {
for (int dy = -1; dy < 2; dy++) {
for (int dz = -1; dz < 2; dz++) {
if (dx == 0 && dy == 0 && dz == 0) continue; neighborIdx(0) = (currentPtr->index)(0) + dx; neighborIdx(1) = (currentPtr->index)(1) + dy; neighborIdx(2) = (currentPtr->index)(2) + dz; if (neighborIdx(0) < 0 || neighborIdx(0) >= GLX_SIZE || neighborIdx(1) < 0 || neighborIdx(1) >= GLY_SIZE || neighborIdx(2) < 0 || neighborIdx(2) >= GLZ_SIZE) continue; neighborPtrSets.push_back(GridNodeMap[neighborIdx(0)][neighborIdx(1)][neighborIdx(2)]); edgeCostSets.push_back(sqrt(dx * dx + dy * dy + dz * dz)); } } } } double AstarPathFinder::getHeu(GridNodePtr node1, GridNodePtr node2) {
/*STEP 1 choose possible heuristic function you want Manhattan, Euclidean, Diagonal, or 0 (Dijkstra) Remember tie_breaker learned in lecture, add it here ? */ // ROS_INFO("[node] calcute Heu"); // return getDiagHeu(node1, node2); double tie_breaker = 1 + 1 / 1000; return tie_breaker * getDiagHeu(node1, node2); } double AstarPathFinder::getEuclHeu(GridNodePtr node1, GridNodePtr node2) {
// calculate distance at each dimention double dx = node1->index(0) - node2->index(0); double dy = node1->index(1) - node2->index(1); double dz = node1->index(2) - node2->index(2); double result1 = sqrt(dx * dx + dy * dy + dz * dz); // double result2 = (node2->index - node1->index).norm(); // cout.setf(ios::fixed); // cout << "norm1 = " << setprecision(4) << result1 << endl; // cout << "diff = " << (node2->index - node1->index) << endl; // cout << "norm2 = " << setprecision(4) << result2 << endl; return result1; } double AstarPathFinder::getDiagHeu(GridNodePtr node1, GridNodePtr node2) {
double dx = abs(node1->index(0) - node2->index(0)); double dy = abs(node1->index(1) - node2->index(1)); double dz = abs(node1->index(2) - node2->index(2)); double h = 0.0; int diag = min(min(dx, dy), dz); dx -= diag; dy -= diag; dz -= diag; if (dx == 0) h = 1.0 * sqrt(3.0) * diag + sqrt(2.0) * min(dy, dz) + 1.0 * abs(dy - dz); if (dy == 0) h = 1.0 * sqrt(3.0) * diag + sqrt(2.0) * min(dx, dz) + 1.0 * abs(dx - dz); if (dz == 0) h = 1.0 * sqrt(3.0) * diag + sqrt(2.0) * min(dx, dy) + 1.0 * abs(dx - dy); return h; } double AstarPathFinder::getManhHeu(GridNodePtr node1, GridNodePtr node2) {
double dx = abs(node1->index(0) - node2->index(0)); double dy = abs(node1->index(1) - node2->index(1)); double dz = abs(node1->index(2) - node2->index(2)); return dx + dy + dz; } void AstarPathFinder::AstarGraphSearch(Vector3d start_pt, Vector3d end_pt) {
ros::Time time_1 = ros::Time::now(); // index of start_point and end_point Vector3i start_idx = coord2gridIndex(start_pt); // what is coord2gridIndex mean? Vector3i end_idx = coord2gridIndex(end_pt); goalIdx = end_idx; // position of start_point and end_point start_pt = gridIndex2coord(start_idx); end_pt = gridIndex2coord(end_idx); // Initialize the pointers of struct GridNode which represent start node and // goal node GridNodePtr startPtr = new GridNode(start_idx, start_pt); GridNodePtr endPtr = new GridNode(end_idx, end_pt); // openSet is the open_list implemented through multimap in STL library openSet.clear(); // currentPtr represents the node with lowest f(n) in the open_list GridNodePtr currentPtr = NULL; GridNodePtr neighborPtr = NULL; // put start node in open set startPtr->gScore = 0; startPtr->fScore = getHeu(startPtr, endPtr); // f = h + g = h + 0 startPtr->id = 1; startPtr->coord = start_pt; openSet.insert(make_pair(startPtr->fScore, startPtr)); // startPtr->cameFrom = startPtr; / STEP 2: some else preparatory works which should be done before while loop please write your code below, neighbour of start point / double tentative_gScore; vector<GridNodePtr> neighborPtrSets; vector<double> edgeCostSets; // this is the main loop while (!openSet.empty()) {
/* step 3: Remove the node with lowest cost function from open set to closed set, please write your code below IMPORTANT NOTE!!! This part you should use the C++ STL: multimap, more details can be find in Homework description */ // get the min f node from open set to current currentPtr = openSet.begin()->second; // if the current node is the goal if (currentPtr->index == goalIdx) {
ros::Time time_2 = ros::Time::now(); terminatePtr = currentPtr; ROS_WARN("[A*]{sucess} Time in A* is %f ms, path cost is %f m", (time_2 - time_1).toSec() * 1000.0, currentPtr->gScore * resolution); // cout << "final point" << endl << terminatePtr->coord << endl; // cout << "came frome" << endl << terminatePtr->cameFrom->coord << endl; return; } // put to close, and erase it openSet.erase(openSet.begin()); currentPtr->id = -1; // STEP 4: finish AstarPathFinder::AstarGetSucc, get the succetion AstarGetSucc(currentPtr, neighborPtrSets, edgeCostSets); /* STEP 5: For all unexpanded neigbors "m" of node "n", please finish this for loop please write your code below / for (int i = 0; i < (int)neighborPtrSets.size(); i++) {
/* Judge if the neigbors have been expanded,please write your code below IMPORTANT NOTE!!! neighborPtrSets[i]->id = -1 : in closed set neighborPtrSets[i]->id = 1 : in open set */ neighborPtr = neighborPtrSets[i]; if (isOccupied(neighborPtr->index) || neighborPtr->id == -1) continue; double edge_cost = edgeCostSets[i]; tentative_gScore = currentPtr->gScore + edge_cost; if (neighborPtr->id != 1) {
// discover a new node, which is not in the open set /* STEP 6: As for a new node, do what you need do ,and then put neighbor in open set and record it,please write your code below */ // insert to open set openSet.insert(make_pair(startPtr->fScore, neighborPtrSets[i])); neighborPtr->id = 1; neighborPtr->cameFrom = currentPtr; neighborPtr->gScore = tentative_gScore; neighborPtr->fScore = neighborPtr->gScore + getHeu(neighborPtr, endPtr); neighborPtr->nodeMapIt = openSet.insert(make_pair(neighborPtr->fScore, neighborPtr)); // put neighbor in open set and record it. continue; } else if (neighborPtr->gScore >= tentative_gScore) // compare original f and new f from current // this node is in open set and need to judge if it needs to update, // he "0" should be deleted when you are coding {
/* STEP 7: As for a node in open set, update it , maintain the openset, and then put neighbor in open set and record it please write your code below */ neighborPtr->cameFrom = currentPtr; neighborPtr->gScore = tentative_gScore; neighborPtr->fScore = tentative_gScore + getHeu(neighborPtr, endPtr); openSet.erase(neighborPtr->nodeMapIt); neighborPtr->nodeMapIt = openSet.insert(make_pair(neighborPtr->fScore, neighborPtr)); // if change its parents, update the expanding direction for (int i = 0; i < 3; i++) {
neighborPtr->dir(i) = neighborPtr->index(i) - currentPtr->index(i); if (neighborPtr->dir(i) != 0) neighborPtr->dir(i) /= abs(neighborPtr->dir(i)); } } } } // if search fails ros::Time time_2 = ros::Time::now(); if ((time_2 - time_1).toSec() > 0.1) ROS_WARN("Time consume in Astar path finding is %f", (time_2 - time_1).toSec()); } vector<Vector3d> AstarPathFinder::getPath() {
vector<Vector3d> path; vector<GridNodePtr> gridPath; /* STEP 8: trace back from the curretnt nodePtr to get all nodes along the path please write your code below */ gridPath.push_back(terminatePtr); while (terminatePtr->cameFrom != NULL) {
terminatePtr = terminatePtr->cameFrom; gridPath.push_back(terminatePtr); } for (auto ptr : gridPath) path.push_back(ptr->coord); reverse(path.begin(), path.end()); return path; } cite: 本文参照了登龙的相关文章
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/227477.html原文链接:https://javaforall.net


