
在企业自动化办公场景中,将强大的爬虫与自动化工具集成到即时通讯软件(IM)中是提高效率的关键 。OpenClaw(原 Moltbot)作为一款开源的抓取与自动化工具,通过与飞书(Feishu)机器人的集成,可以实现高效的信息推送、智能问答及任务自动化 。本文将详细介绍如何在 AWS 环境下完成这一集成过程.
如果还没在 AWS EC2 上部署 OpenClaw,可参考文章:OpenClaw(Moltbot) + Amazon Bedrock 构建企业级全能 Agent 实战指南
在开始集成前,请确保您已具备以下基础环境 :
- 云基础设施:AWS 俄勒冈区域(Oregon),已创建 VPC、子网及安全组 。
- 计算资源:启动 AWS EC2 实例,推荐机型 ,运行 Ubuntu 系统 。
- 软件环境:已安装 Node.js、Docker 以及 OpenClaw 核心组件 。
- 模型集成:配置 Amazon Bedrock(推荐使用 模型:)并生成安全网关令牌 。
步骤 1:检查与更新 OpenClaw 状态
首先,在 EC2 终端确认 OpenClaw 的安装版本
注意:如果版本低于 ,请务必升级至最新的 版本 。
更多updating内容,可参考
步骤 2:安装飞书插件
运行以下命令安装飞书专用插件,并确认加载状态 :

步骤 3:飞书开放平台配置
1) 创建应用:登录飞书开放平台,在“开发者后台”创建“企业自建应用”,填写应用名称(如 )并点击创建 。
2) 添加能力:在应用详情页点击“添加应用能力”,选择“机器人” 。

3) 获取凭证:在“凭证与基础信息”中记录 App ID 和 App Secret;在“事件与回调”中记录 Verification Token 。
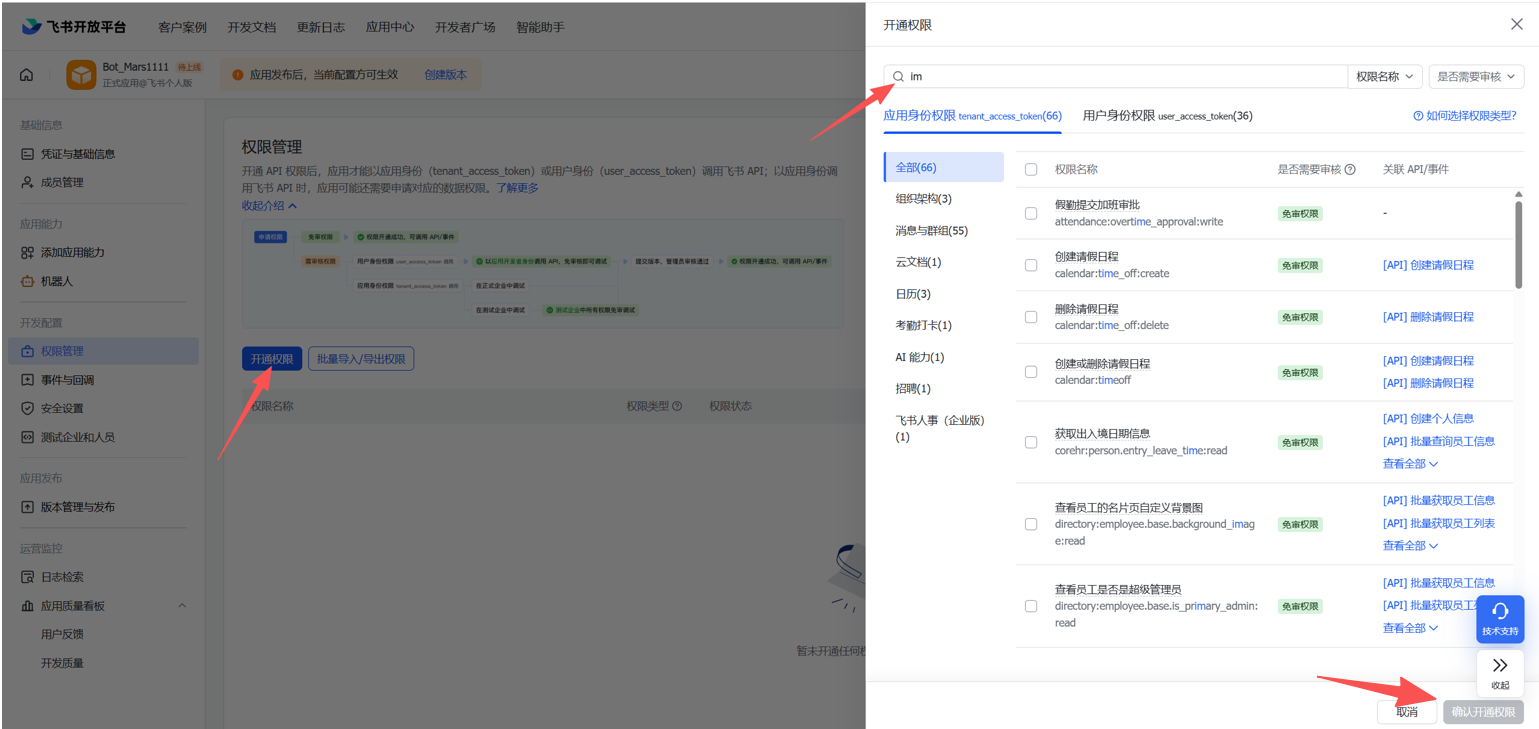
4) 开通权限:在“权限管理”中,根据业务需求开通“应用身份权限”及“用户身份权限” 。
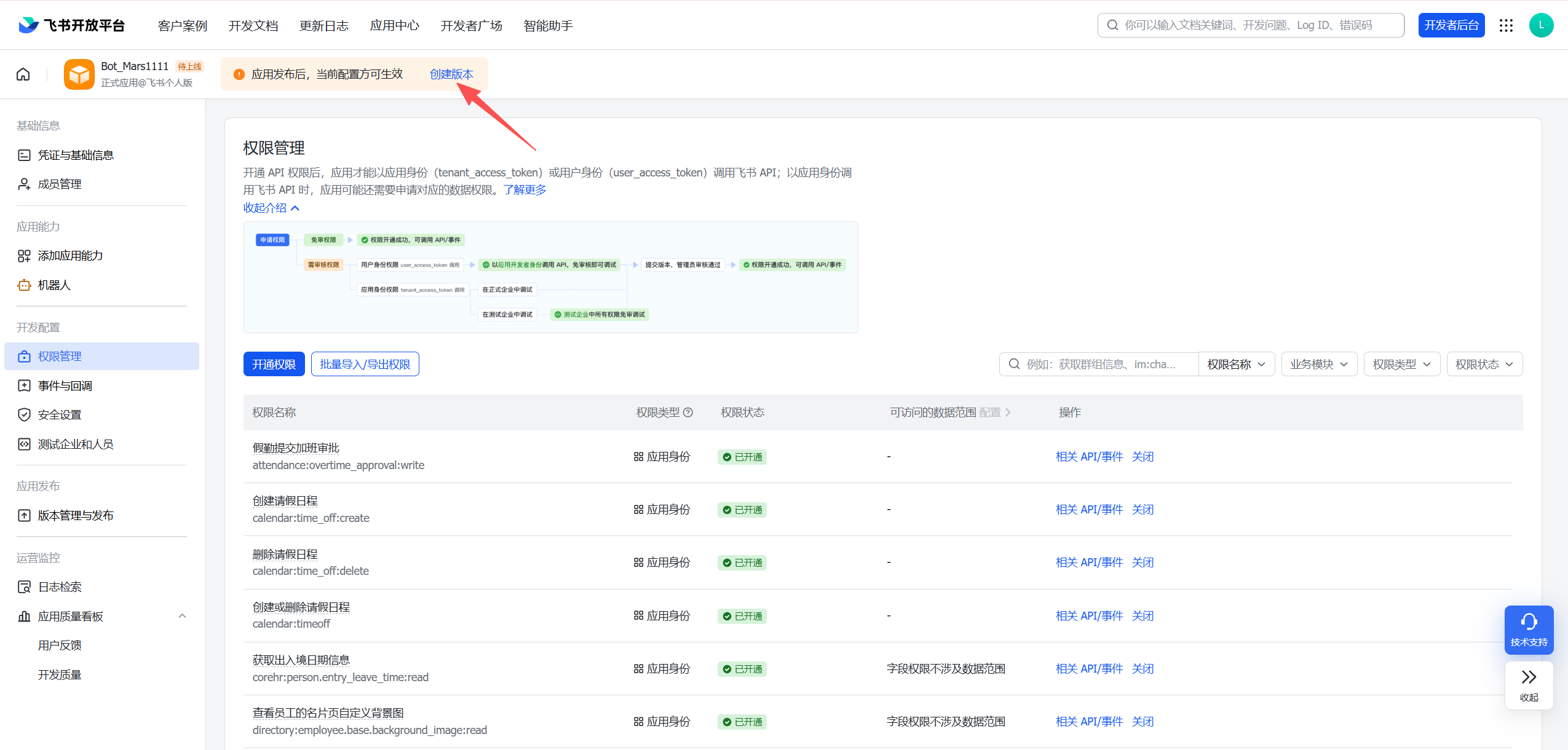
5) 发布版本:点击“版本管理与发布”,创建并发布一个版本。注意:只有发布后的应用才能配置事件回调 。
步骤 4:OpenClaw 通道配置
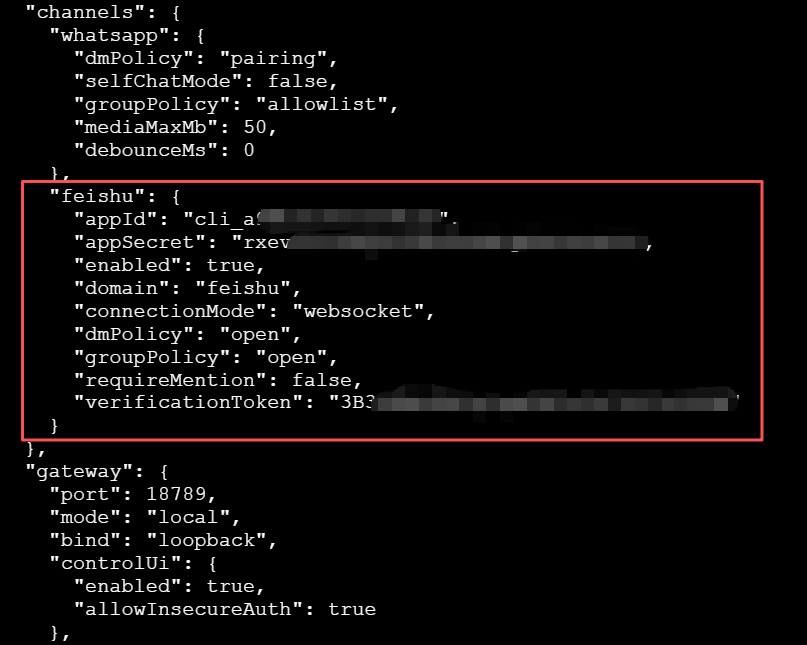
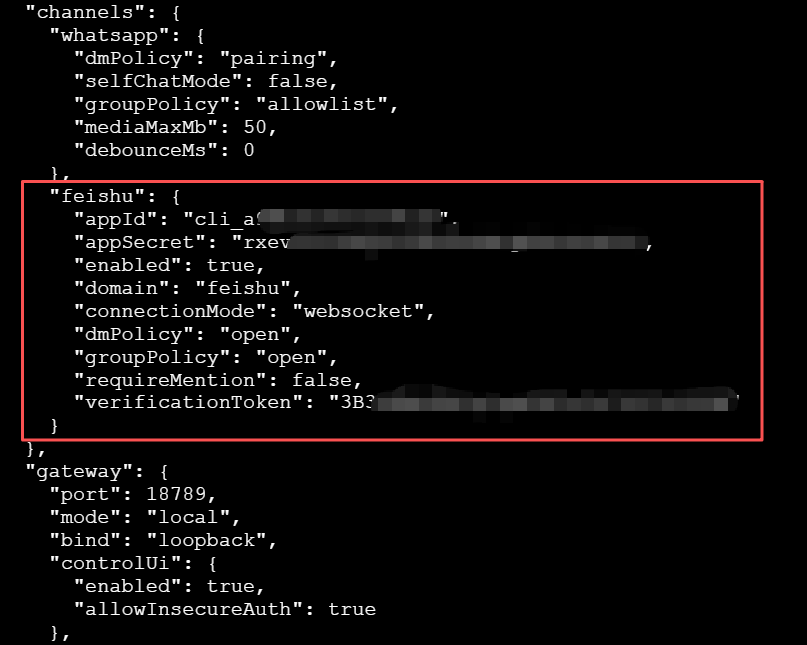
回到 EC2 终端,将获取的凭证配置到 OpenClaw 中,并启用长连接模式 :
可以通过查看配置文件检查是否配置成功
步骤 5:配置飞书事件订阅
回到飞书开放平台“事件与回调”页面 ,
- 事件配置:
选择订阅方式为“长连接”
加事件:搜索并添加 (接收消息 v2.0),以允许机器人接收用户消息 。

- 回调配置
选择订阅方式为“长连接”

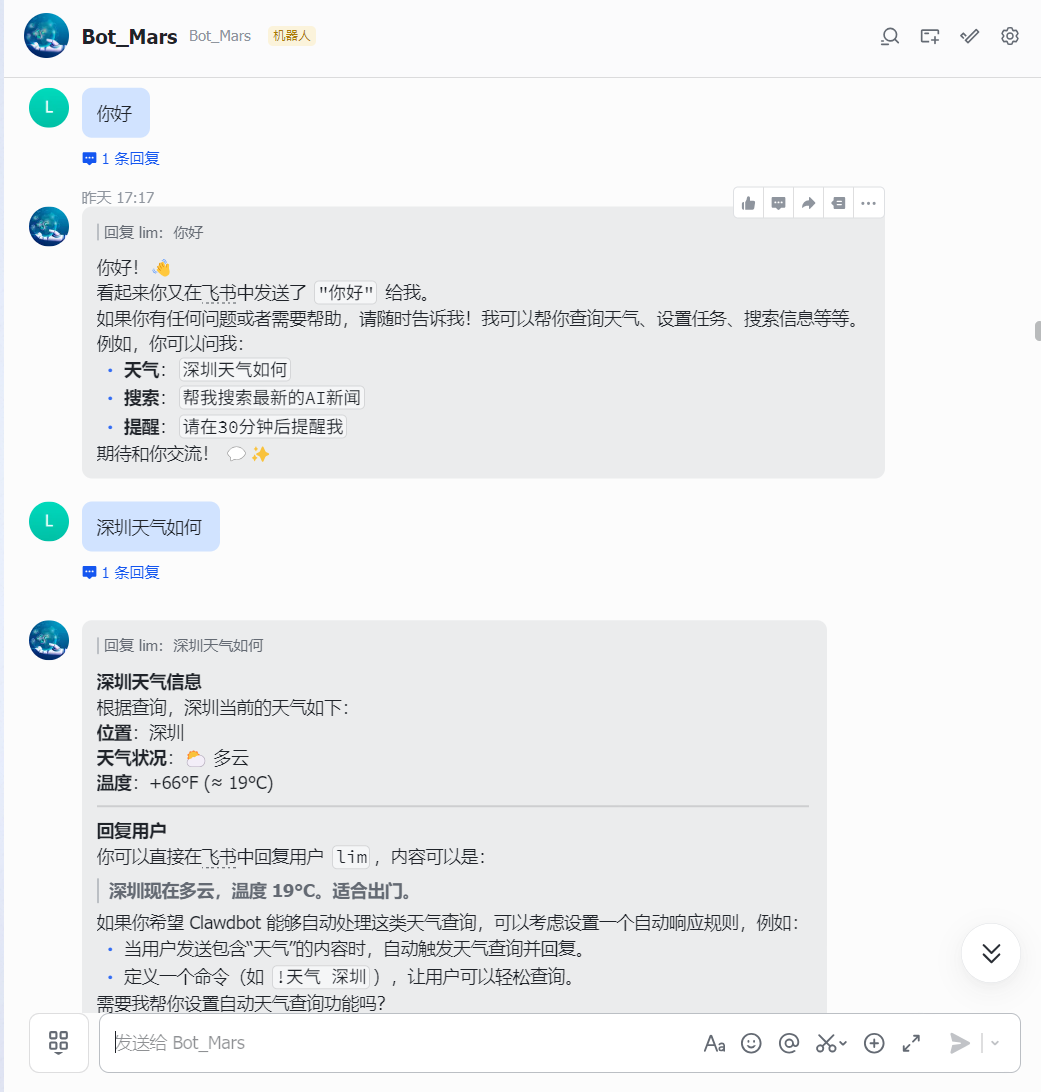
在飞书客户端搜索您创建的机器人名称(如 ),直接发送消息(如“深圳天气如何”)。如果配置正确,OpenClaw 将调用 Bedrock 模型处理请求并返回结果 。
1、如果在连接过程中出现失败,请检查以下内容:
- 进程冲突:确保没有多个网关进程(如 和 )同时运行,这会导致端口占用和连接失败 。
- 版本匹配:确保 OpenClaw 版本与插件版本兼容 。
以下是可能会用到的命令
2、确保 OpenClaw 机器人能正常接收用户输入并回传对话内容:
- 应用身份权限: 接收单聊消息 ()、接收群聊消息 ()、以应用身份发送消息 ()、获取单聊、群聊消息记录 (, )
- 用户身份权限: 获取用户基本信息 ()、获取用户 ID ()
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/250719.html原文链接:https://javaforall.net


