
大家好,又见面了,我是你们的朋友全栈君。
磁盘经过分区和格式化后,如果想要使用这些磁盘,那么还需要挂载。
在挂载某个分区前,需要先建立一个挂载点,这个挂载点是以目录的形式出现的,一旦把某个分区挂载到这个挂载点下,往这个目录写数据时,就都会写到该分区中。
挂载的命令是:mount
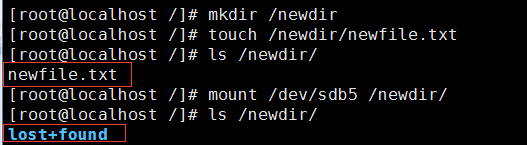
我们先建立一个新目录,并在这个新目录下新建立一个新文件,然后把sdb5挂载到此目录下,并用命令du查看是否已挂载上。

此时我们会发现,新建立的newfile.txt文件不见了!这是因为,一旦该目录被挂载上了之后,该目录下以前的东西就看不见了(数据并没有丢失),解决的方法是卸载该分区。所以,将一个分区挂载到目录下,最好是在一个空目录下。
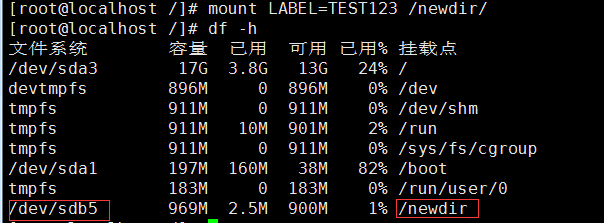
我们还可以使用LABEL的方式挂载分区:
这种方法是临时挂载,如果开机重启后,此挂载就会失效,那么,如果想要开机自动挂载,该如何操作呢?
此时就要通过修改/etc/fstab的配置文件来生效。
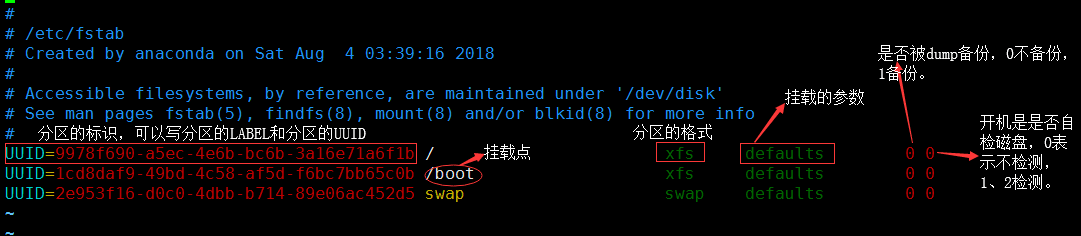
先来查看下/etc/fstab文件的内容:
第1列是分区的标识,可以写分区的LABEL、分区的UUID。
第2列是挂载点。
第3列是分区的格式。
第4列是挂载的一些挂载参数,一般情况下,直接写defaults。
常用选项:
async/sync:async表示与磁盘和内存不同步。
auto/noauto:表示开机自动挂载/不自动挂载。
default:表示按照大多数永久文件系统的默认值设置挂载定义,包含了rw,suid,dev,exec,auto,nouser和async。
ro:按只读权限挂载。
rw:按可读可写权限挂载。
exec/noexec:允许/不允许可执行文件执行,不要把根分区挂载为noexec,否则无法使用系统,连mount命令也无法使用。
user/nouser:允许/不允许root用户外的其他用户挂载分区。为了安全,请用nouser。
suid/nosuid:允许/不允许分区有suid属性,一般设置为nosuid。
usrquota:启动用户的磁盘配额模式,即对用户限定使用的磁盘额度。
grquota:启动群组的磁盘配额模式。
第5列表示是否被dump备份。0表示不备份,1表示备份。
第6列表示开机时是否自检磁盘。0表示不检测,1和2表示检测,1的优先级高,所以先检测1再检测2,如果有多个分区需要开机检测,就都设置为2。
看完了/etc/fstab文件,我们在最后面新增如下一行:
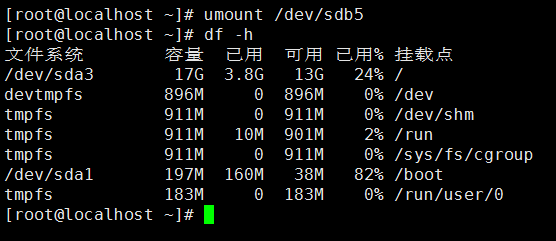
然后卸载之前已经挂载的/dev/sdb5:
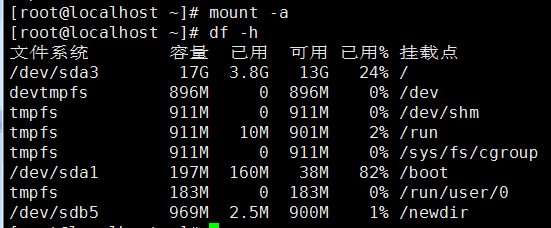
然后执行命令mount -a
此时,我们会发现/dev/sdb5已经挂载到了/newdir下了,mount -a命令,会把/etc/fstab中出现的所有磁盘分区挂载上。
此外,mount -t:用来指定挂载的分区类型。
mount -o:用来指定挂载的分区有哪些特性,即上面/etc/fstab配置文件中第4列的选项。
由于-o选项指定了ro参数,所以该分区是只读的。
再用mount查看/dev/sdb5
发现也有ro参数。
再重新挂载,让sdb5恢复读写权限。
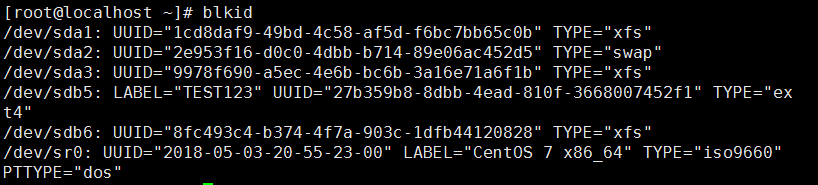
命令blkid查看各分区的UUID。
umount:命令后面可以跟挂载点,也可以跟分区名(如/dev/sdb1),但是不可以LABEL和UUID。
有时候会遇到不能卸载的情况,这是因为当前目录还在卸载的分区上。解决这个问题的办法有两种:一是进入到其他目录;二是使用umount命令的-l参数。







发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/140481.html原文链接:https://javaforall.net


