
大家好,又见面了,我是你们的朋友全栈君。

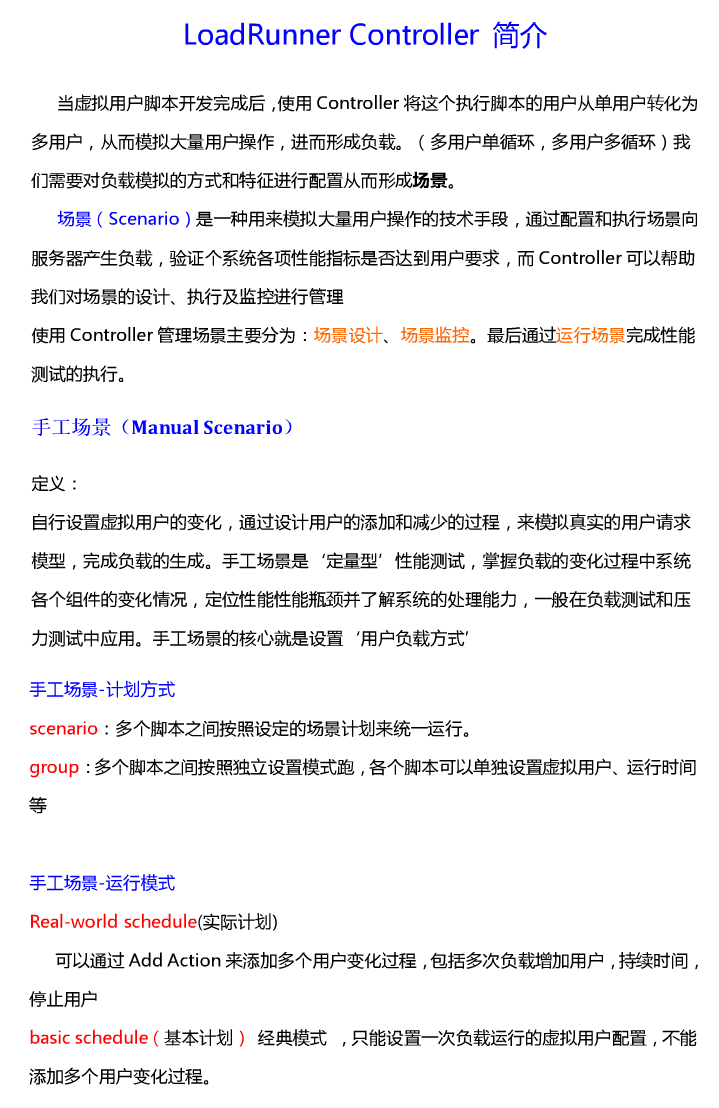
首先打开controller创建一个场景,有手工场景和目标场景设置两个选项,先选择手工场景
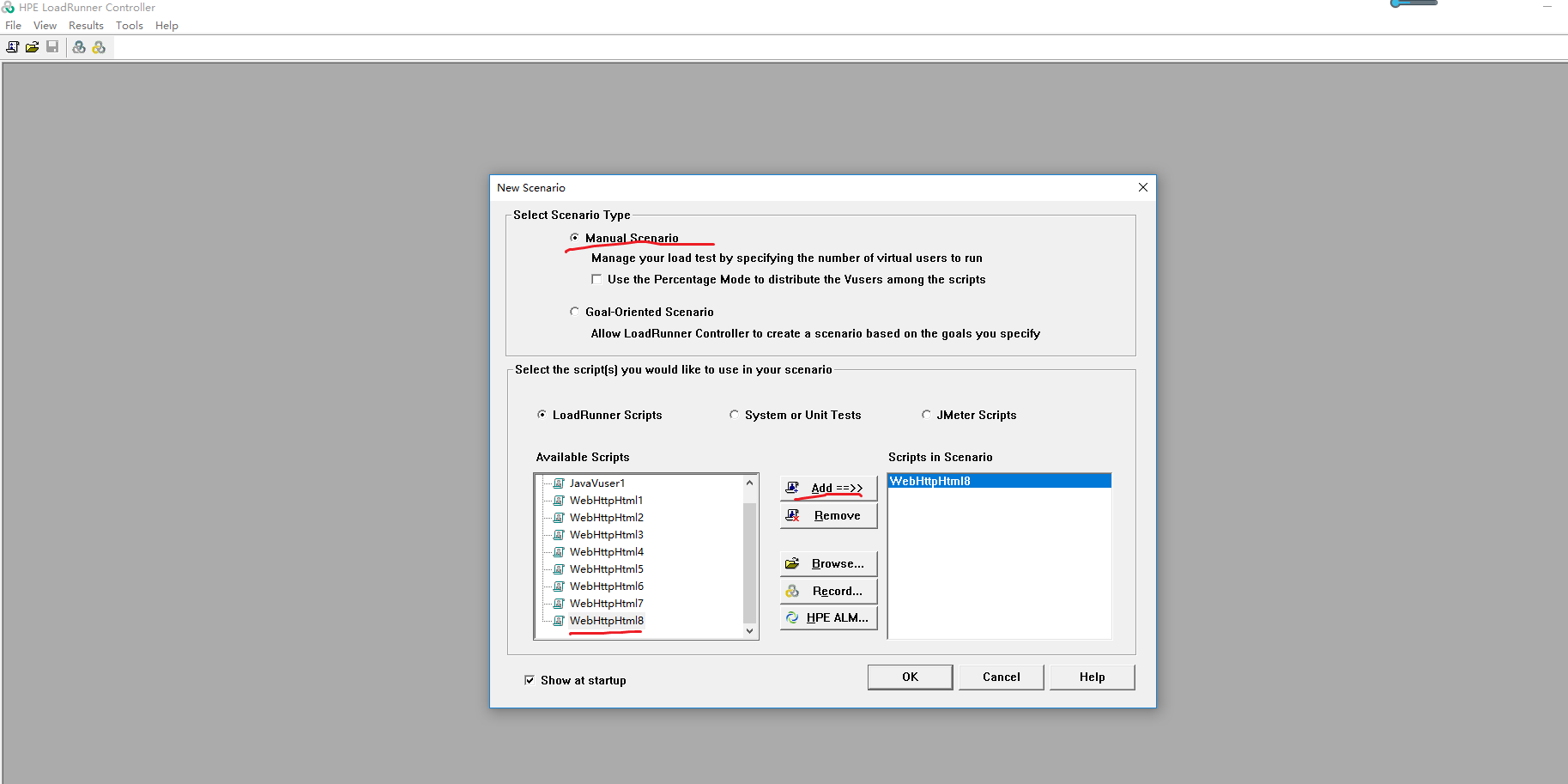
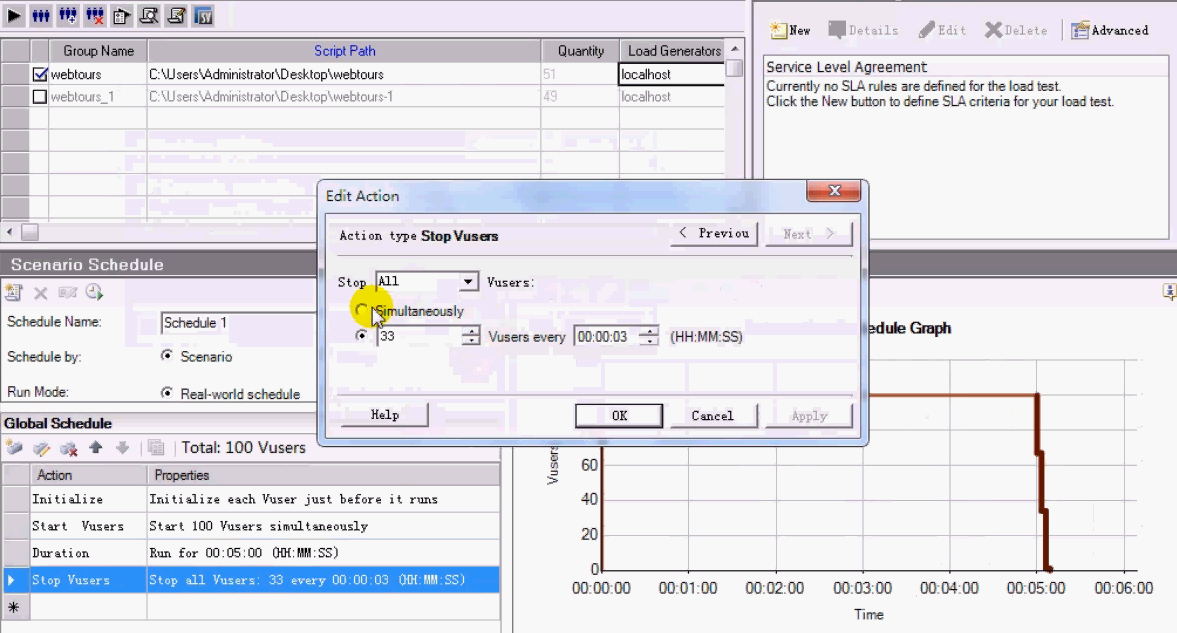
手工场景设置Global Schedule:Scenario
初始化:所有用户同时初始化,每隔多少秒初始化多少用户,每个用户运行之前初始化
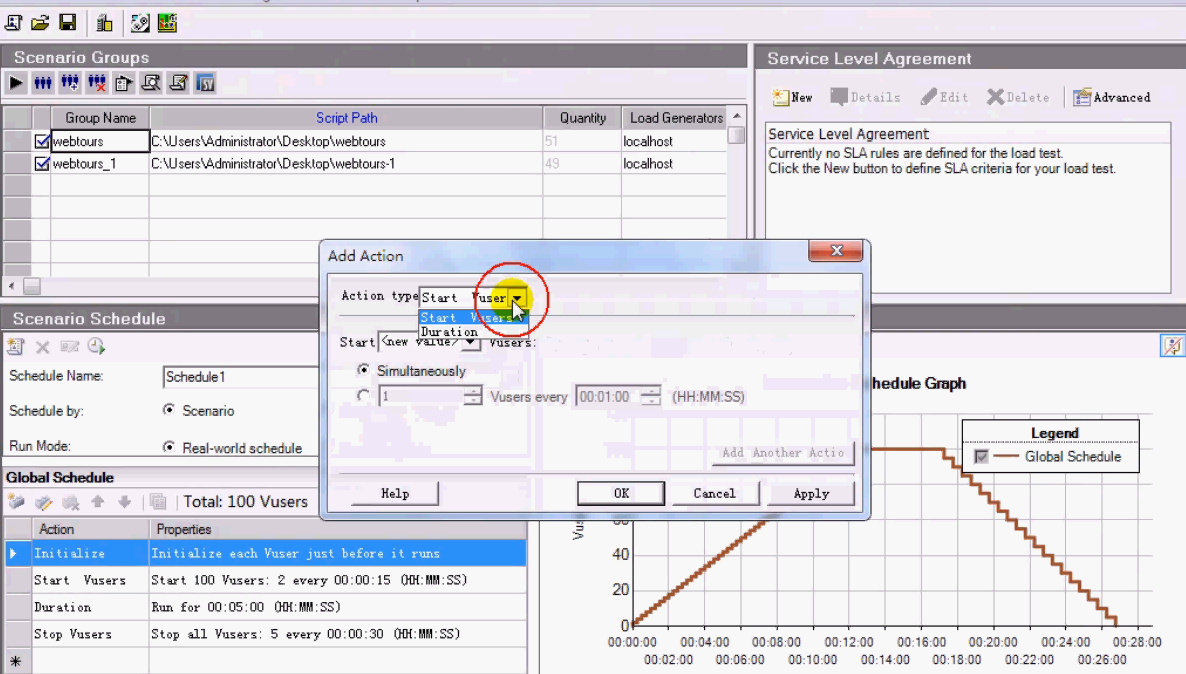
启动用户:多少用户启动,同时启动,每隔多长时间启动多少用户
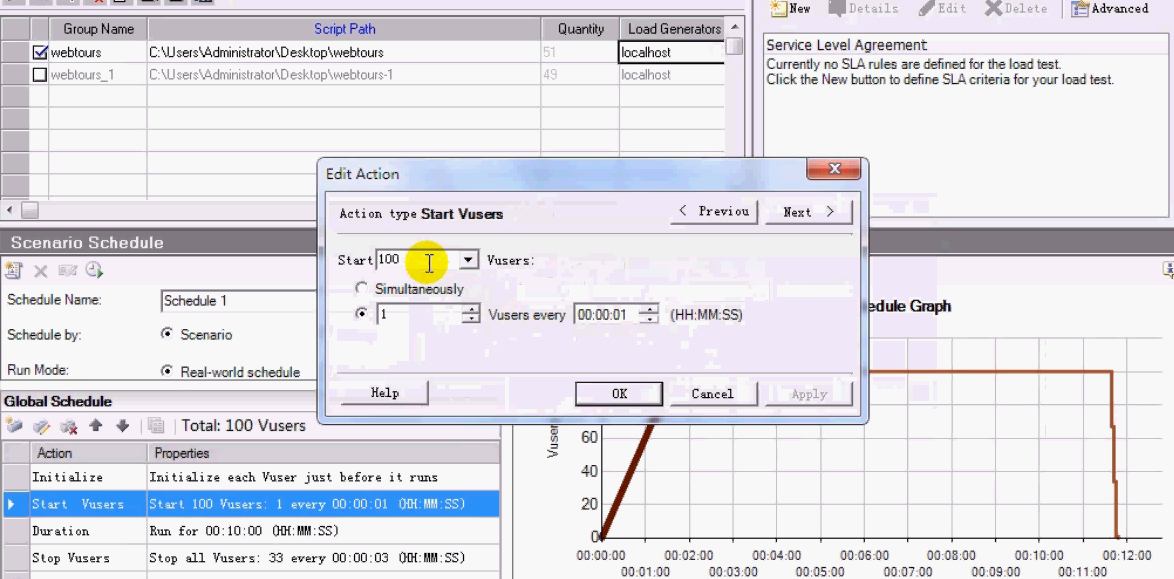
运行时间:持续运行直到结束,持续运行时间
用户退出:用户同时退出,每隔多长时间退出
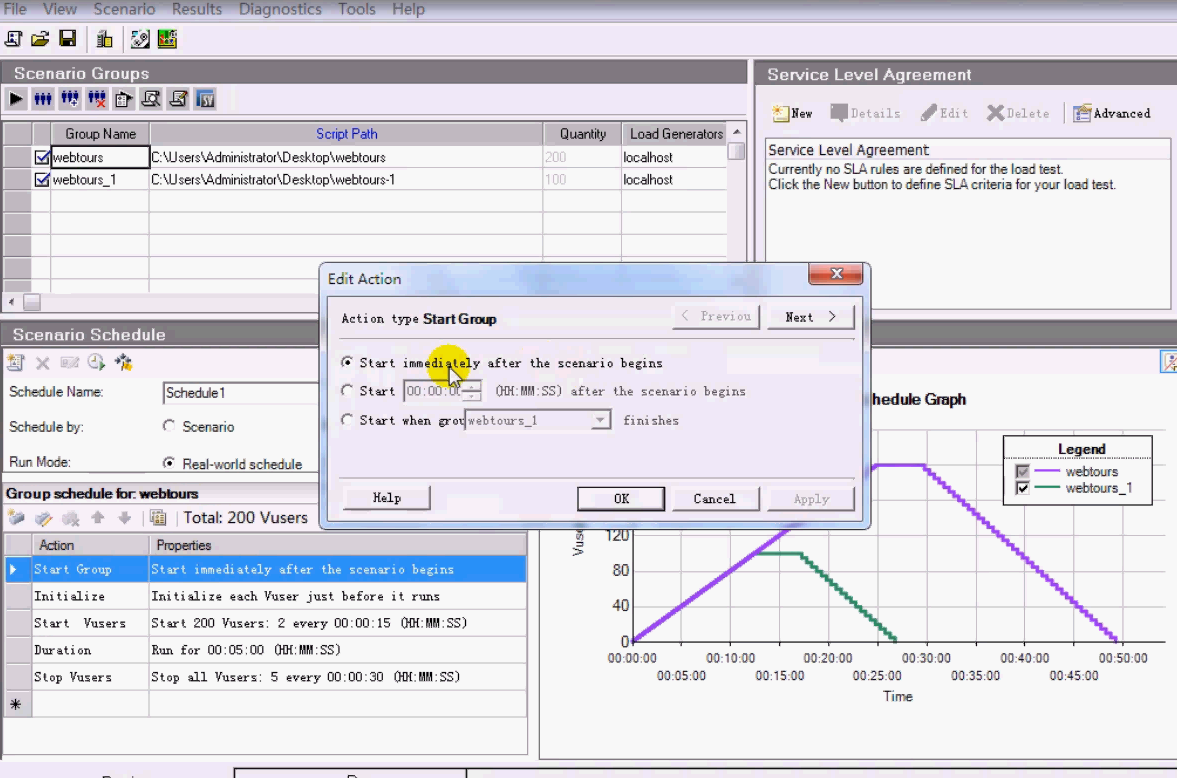
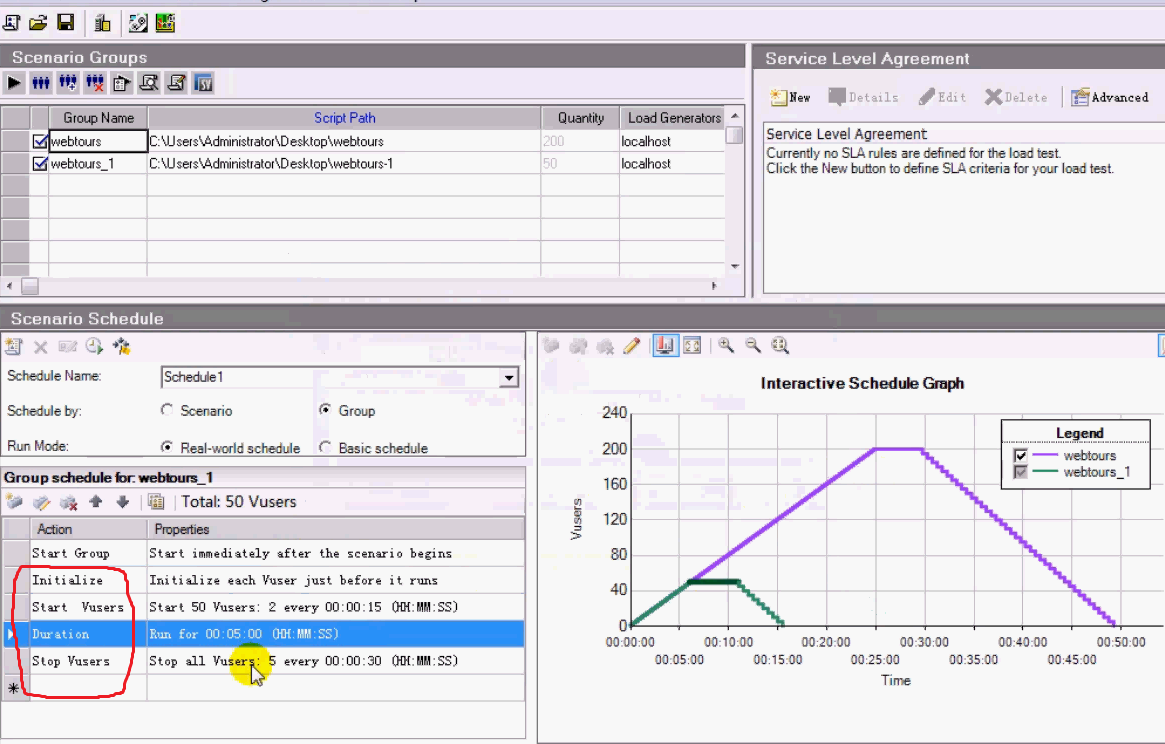
手工场景设置Global Schedule:Group
启动组:场景启动后立即启动组,场景启动后多长时间启动组,上一个组结束后启动
剩下的其他设置和上面的一样Scenario一样,Group和Scenario的区别就是,Scenario相当于一个大的班级,同一个老师,Group相当于不同的班级,不同的老师

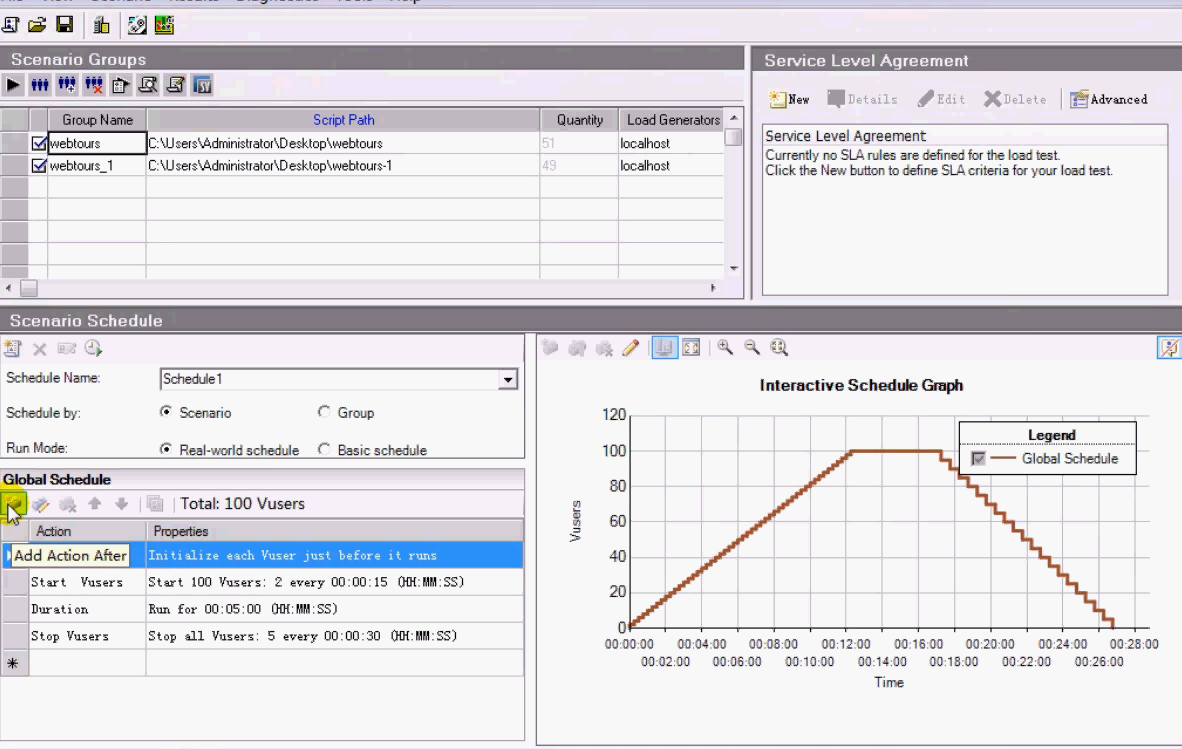
还可以添加设置场景
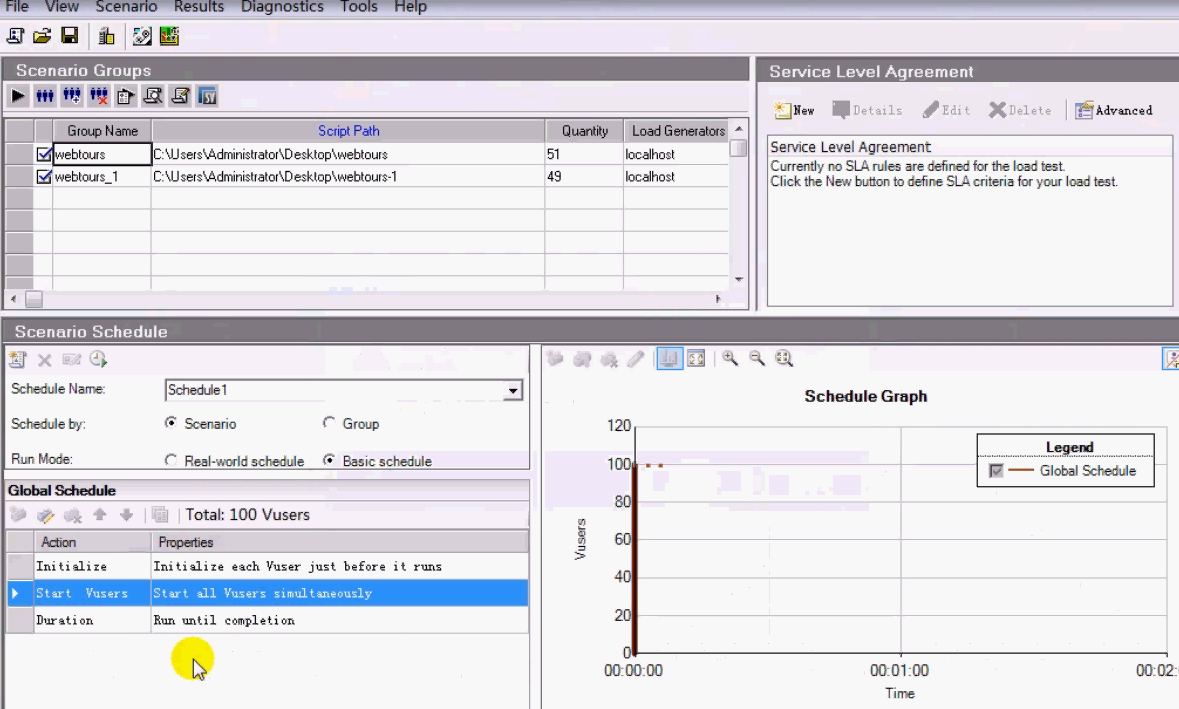
手工场景设置Basic Schedule:有很多就无法选择了,根据实际情况调整
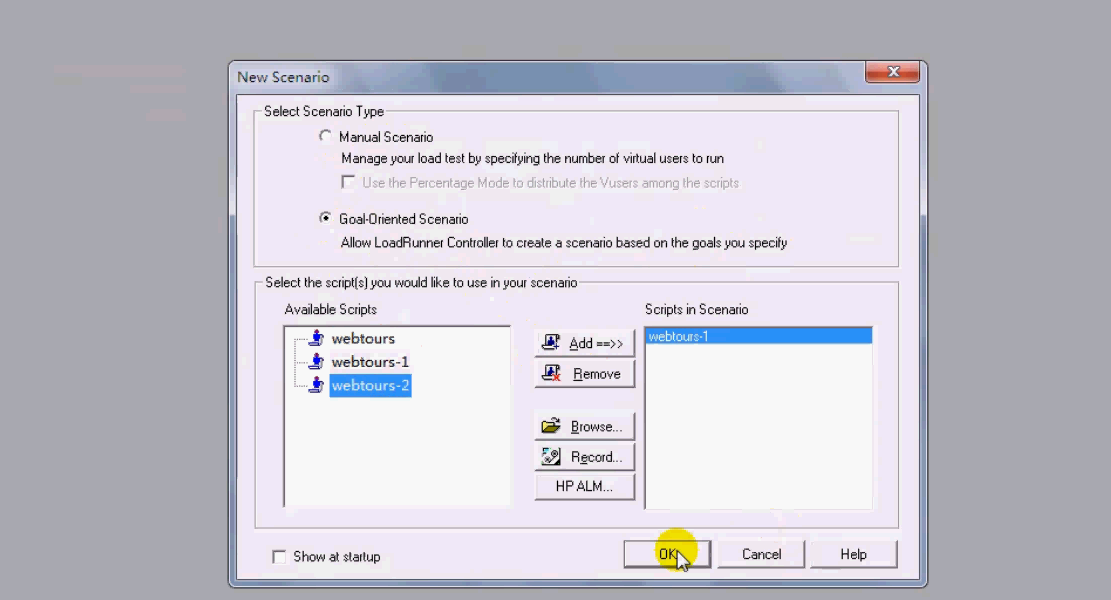
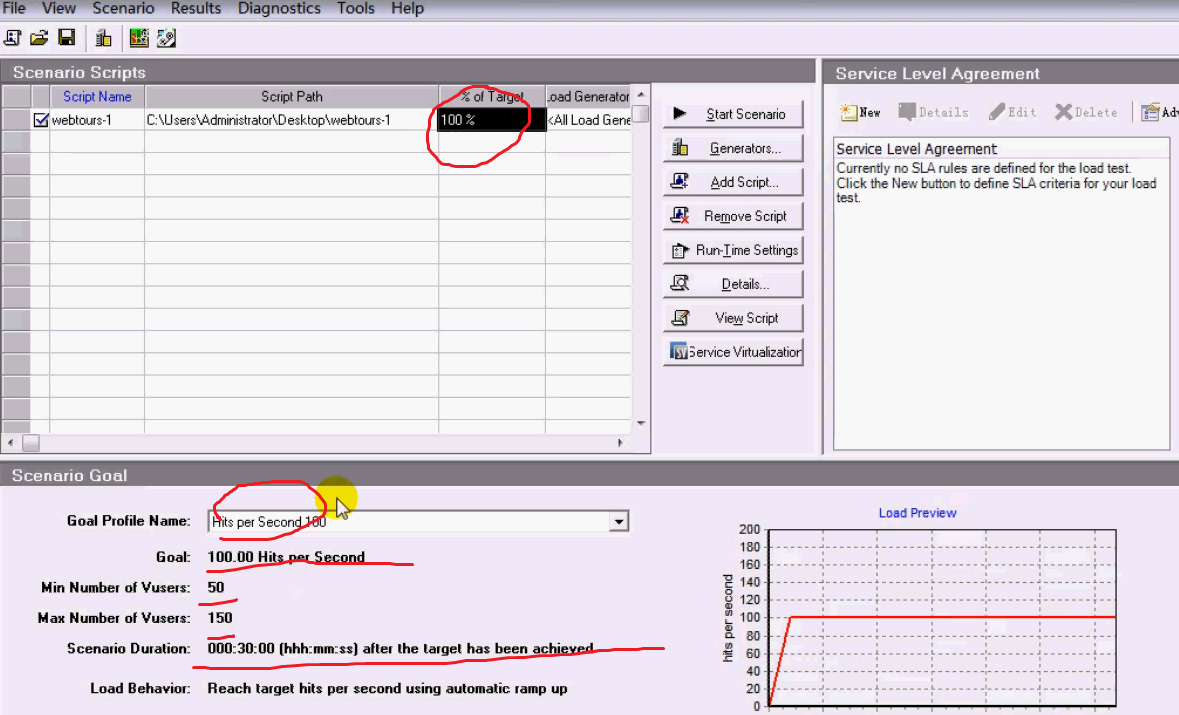
首先打开controller创建一个场景,有手工场景和目标场景设置两个选项,先选择目标场景
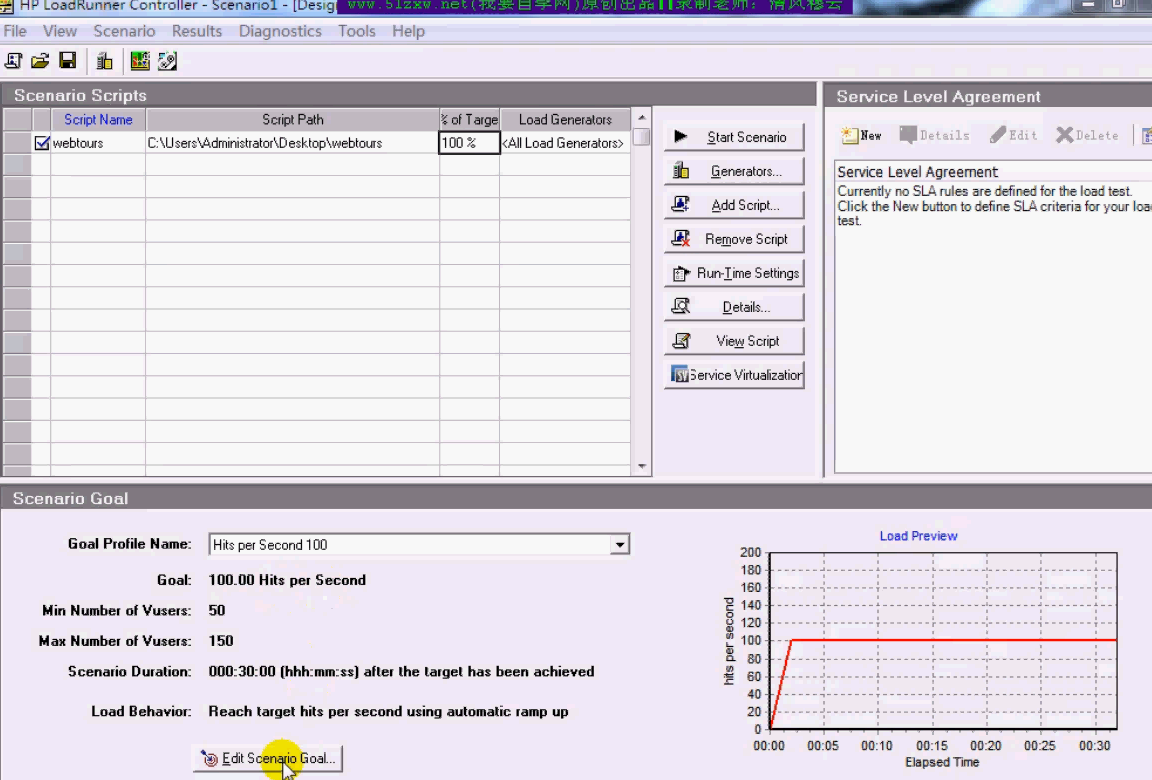
打开后的界面,红色部分为目标的设定
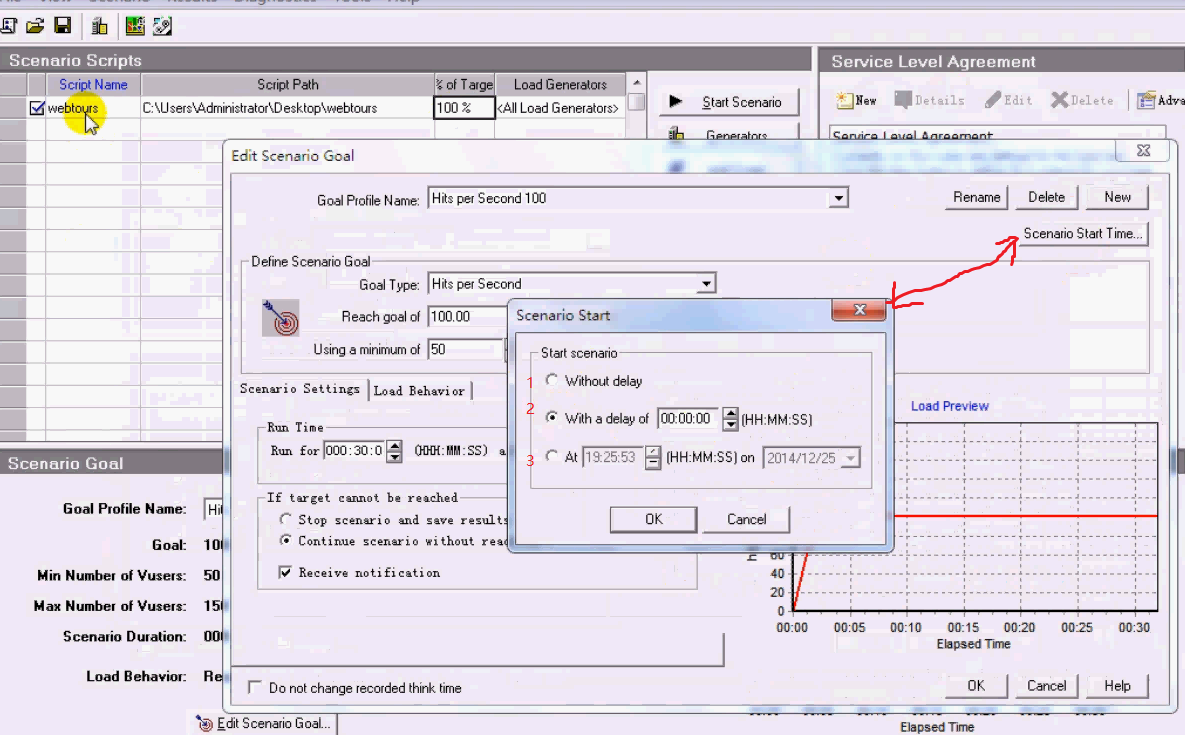
目标场景编辑,点击编辑
场景开始时间1:没有延迟 2:延迟多长时间 3:设置具体的开始时间
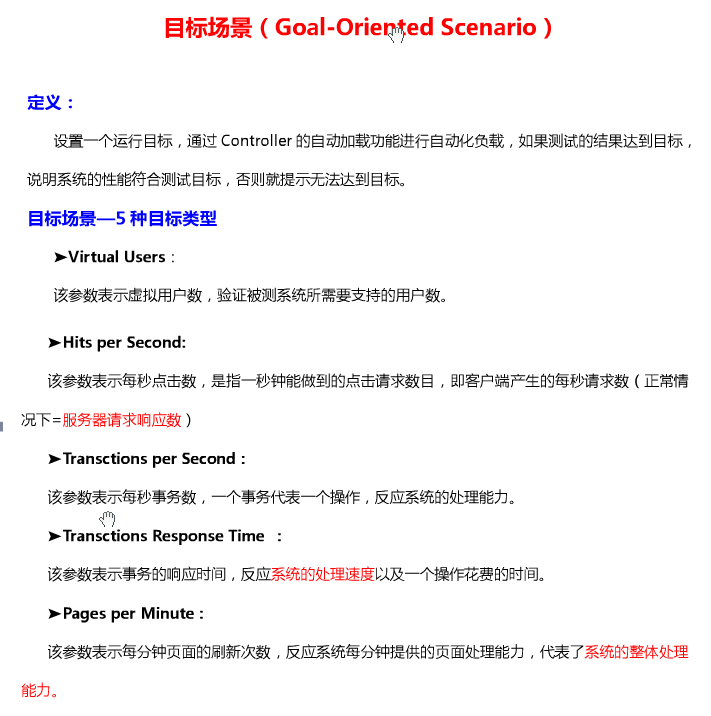
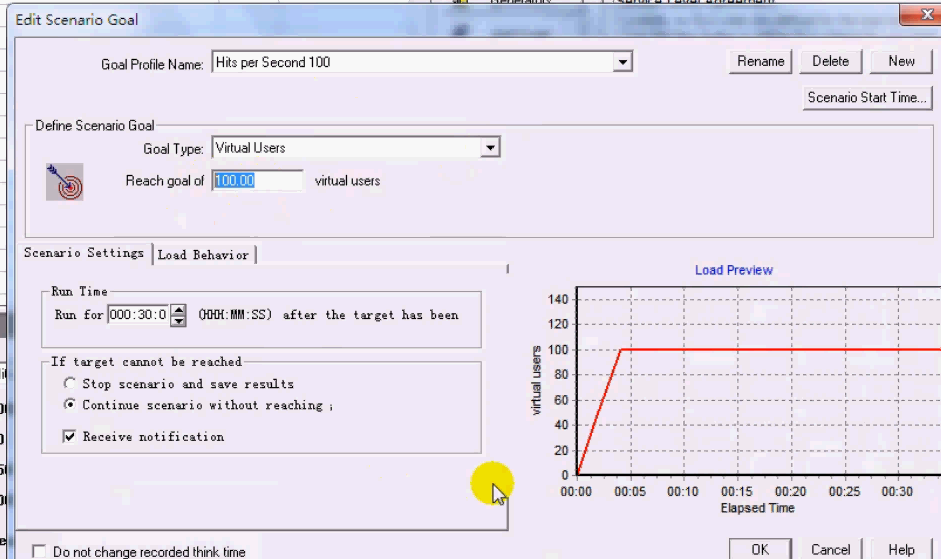
设置用户数
每秒点击数
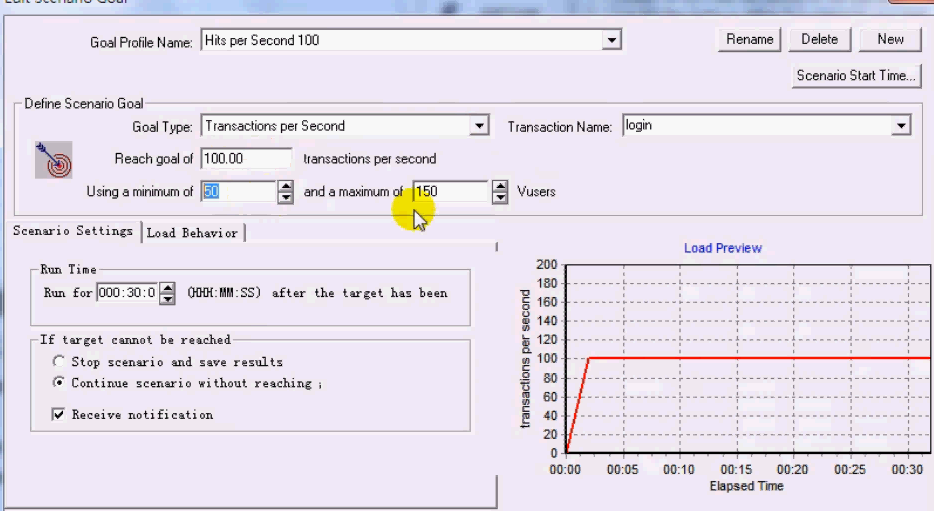
每秒事务数
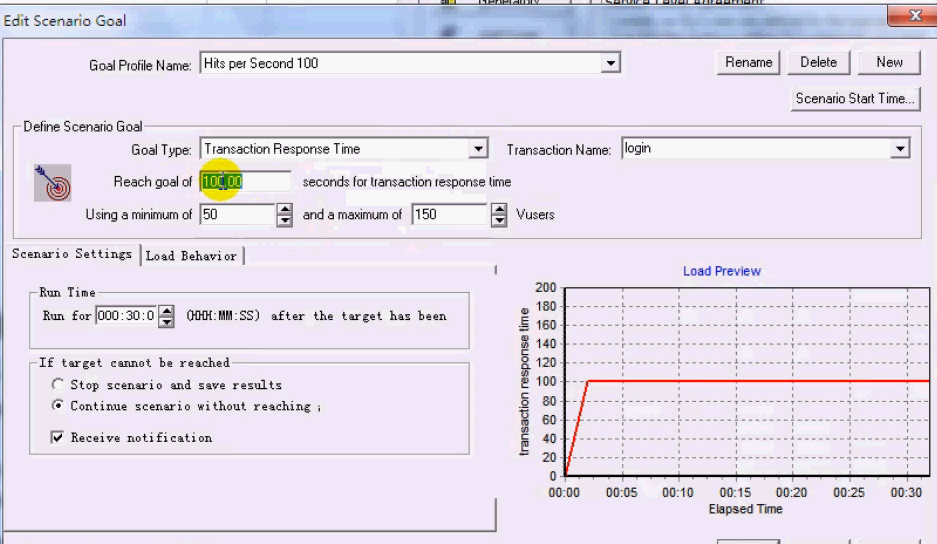
事务相应时间
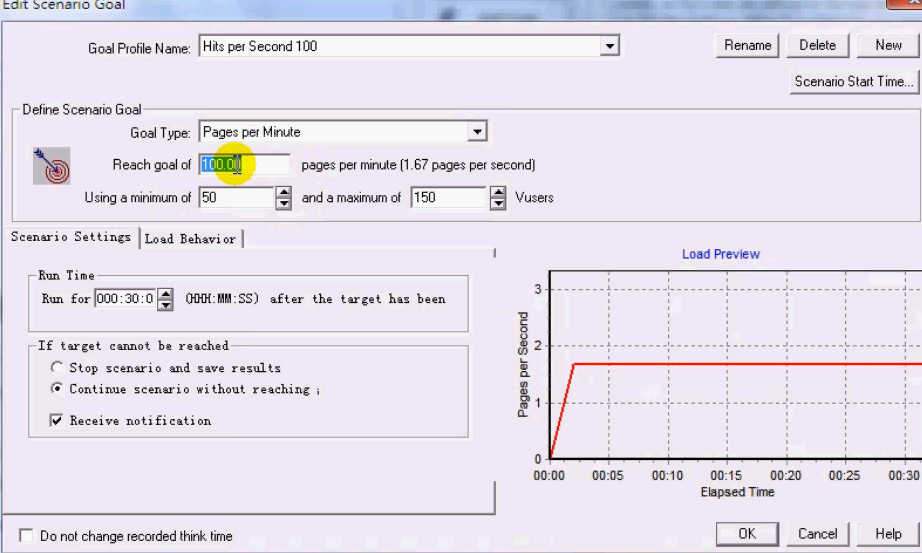
每分钟事务刷新次数

版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请联系我们举报,一经查实,本站将立刻删除。
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/142428.html原文链接:https://javaforall.net


