
大家好,又见面了,我是你们的朋友全栈君。
转自:http://blog.csdn.net/xiaqunfeng123/article/details/17302003
Sobel 算子是一个离散微分算子 (discrete differentiation operator)。 它结合了高斯平滑和微分求导,用来计算图像灰度函数的近似梯度。
图像边缘,相素值会发生显著的变化了。表示这一改变的一个方法是使用 导数 。 梯度值的大变预示着图像中内容的显著变化。用更加形象的图像来解释,假设我们有一张一维图形。下图2中灰度值的”跃升”表示边缘的存在,图3中使用一阶微分求导我们可以更加清晰的看到边缘”跃升”的存在。


图1、lena.jpg
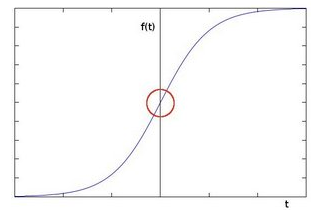
图2、像素一维图形
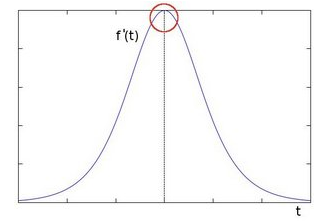
图3、一阶导数
具体是采用卷积的计算方法实现的。假设被作用的图像为 ,在两个方向上求导:
,在两个方向上求导:
水平变化求导:将 与一个奇数大小的内核 进行卷积。比如,当内核大小为3时, 的计算结果为图4a:
垂直变化求导:将 I 与一个奇数大小的内核  进行卷积。比如,当内核大小为3时, 的计算结果为图4b:
进行卷积。比如,当内核大小为3时, 的计算结果为图4b:
在图像的每一点,结合以上两个结果求出近似 梯度 ,如图4c:
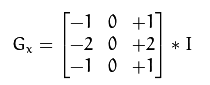
图4a
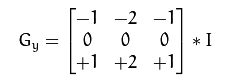
图4b
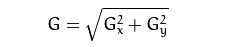
图4c
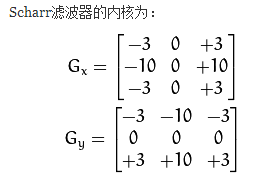
因为Sobel算子只是求取了导数的近似值,当内核大小为 时,以上Sobel内核可能产生比较明显的误差。为解决这一问题,OpenCV提供了 Scharr 函数,但该函数仅作用于大小为3的内核,该函数的运算与Sobel函数一样快,但结果却更加精确。
时,以上Sobel内核可能产生比较明显的误差。为解决这一问题,OpenCV提供了 Scharr 函数,但该函数仅作用于大小为3的内核,该函数的运算与Sobel函数一样快,但结果却更加精确。
两种实现版本:
C 版本:
cvSobel ( const cvArr* src, CvArr* dst, int xorder, int yorder, int aperture_size =3 )
src, dst 分别是源图像和目标图像,xorder ,yorder – 分别为x,y方向导数运算参数,可取0,1,2 。aperture_size是方形滤波器的宽,是小于7的奇数。
具体见《Learning OpenCV》那本书,P.170页
下面是代码,比较简单:
#include <highgui.h> #include <cv.h> using namespace cv; using namespace std; int main(int argc, char ** argv) { IplImage* src, *dstx,*dsty,*dst; src = cvLoadImage( "car.png",0 ); dst = cvCreateImage( cvGetSize( src ), IPL_DEPTH_16S, 1 ); dstx = cvCreateImage( cvGetSize( src ), IPL_DEPTH_16S, 1 ); dsty = cvCreateImage( cvGetSize( src ), IPL_DEPTH_16S, 1 ); cvNamedWindow( "src" ); cvNamedWindow( "sobel" ); cvShowImage( "src", src ); cvSobel( src, dstx, 1, 0, 7 ); //sobel cvSobel( src, dsty, 0, 1, 7 ); cvAddWeighted(dstx,0.5,dsty,0.5,0,dst); cvShowImage( "sobel", dst ); cvWaitKey(0); cvReleaseImage( &src ); cvReleaseImage( &dst ); return 0; }
效果图:

C++版本:
先来看一下C++下 Sobel 的定义
C++: void Sobel( InputArray src , OutputArray dst, int ddepth, int dx, int dy, int ksize=3,
double scale=1,double delta=0,intborderType=BORDER_DEFAULT )
各参数的意义如下:
src – 输入图像。dst – 输出图像,与输入图像同样大小,拥有同样个数的通道。
ddepth –输出图片深度;下面是输入图像支持深度和输出图像支持深度的关系:
src.depth() = CV_8U, ddepth = -1/CV_16S/CV_32F/CV_64F
src.depth() = CV_16U/CV_16S, ddepth = -1/CV_32F/CV_64F
src.depth() = CV_32F, ddepth = -1/CV_32F/CV_64F
src.depth() = CV_64F, ddepth = -1/CV_64F
当 ddepth为-1时, 输出图像将和输入图像有相同的深度。输入8位图像则会截取顶端的导数。
xorder – x方向导数运算参数。yorder – y方向导数运算参数。
ksize – Sobel内核的大小,可以是:1,3,5,7。 注意:只可以是小于7 的奇数
scale – 可选的缩放导数的比例常数。delta – 可选的增量常数被叠加到导数中。borderType – 用于判断图像边界的模式。
下面是程序:
#include "opencv2/imgproc/imgproc.hpp" #include "opencv2/highgui/highgui.hpp" #include <stdlib.h> #include <stdio.h> using namespace cv; using namespace std; int main( int argc, char** argv ) { Mat src, src_gray; Mat grad; char* window_name = "求解梯度"; int scale = 1; int delta = 0; int ddepth = CV_16S; src = imread( "car.png" ); if( !src.data ) { return -1; } //高斯模糊 GaussianBlur( src, src, Size(3,3), 0, 0, BORDER_DEFAULT ); //转成灰度图 cvtColor( src, src_gray,CV_RGB2GRAY ); namedWindow( window_name, CV_WINDOW_AUTOSIZE ); Mat grad_x, grad_y; Mat abs_grad_x, abs_grad_y; //x方向梯度计算 Sobel( src_gray, grad_x, ddepth, 1, 0, 3, scale, delta, BORDER_DEFAULT ); convertScaleAbs( grad_x, abs_grad_x ); //y方向梯度计算 Sobel( src_gray, grad_y, ddepth, 0, 1, 3, scale, delta, BORDER_DEFAULT ); convertScaleAbs( grad_y, abs_grad_y ); //加权和 addWeighted( abs_grad_x, 0.5, abs_grad_y, 0.5, 0, grad ); imshow( window_name, grad ); waitKey(); return 0; }
如果要用Scharr滤波器的话,把Sobel那行代码替换掉就好了:
Scharr( src_gray, grad_x, ddepth, 1, 0, scale, delta, BORDER_DEFAULT ); Scharr( src_gray, grad_x, ddepth, 0, 1, scale, delta, BORDER_DEFAULT );
效果图:


参考资料:http://docs.opencv.org/doc/tutorials/imgproc/imgtrans/sobel_derivatives/sobel_derivatives.html
转载请注明出处:http://blog.csdn.net/xiaqunfeng123
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/154508.html原文链接:https://javaforall.net


