
大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE稳定放心使用
第3章 系统硬件电路设计3.1总体设计
智能小车采用两个前轮和一个万向轮的方式,在前轮的左右两端各安装一个电机驱动,利用电机驱动芯片L293D来控制两个前轮的左右转向和停止,后轮是一个万向轮,有支撑和转向的作用。在车体底盘的前端装有4个红外光电传感器,用以实现路迹检测和避障功能。
小在小车的车头还装置有超声波探测模块HC-SR04,当前方检测到障碍物时,小车能够做出相应的反应。
总体设计框图如图3-1。
图3-1 总体设计框图(见附件)
3.2电源电路设计
电压的稳定性尤其重要,对此专门设计了稳压电路。使用7805三端稳压集成块,可以保持电压为+5V不变。同时开关起到了为最小系统板上的程序烧写提供电源的作用。电源电路如下图3-2所示。
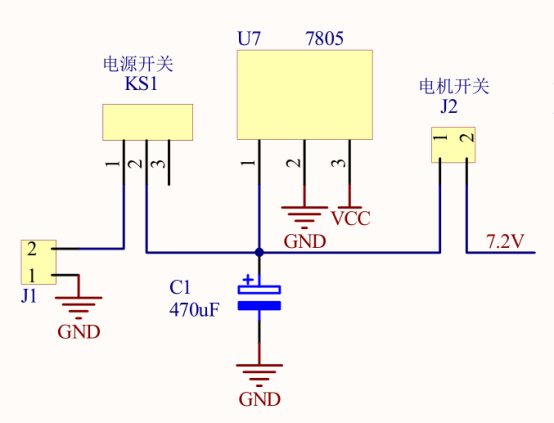

图3-2 5V稳压电源3.3电机驱动电路设计
L293D 共有16个引脚,属于DIP封装。是四倍高电流的H桥驱动程序。双极型脉冲调宽有很多的优点,比如低速时更平稳;释放连续电流;能够四角限运行;电机停止工作后产生微振电流,有助于除去转动时的静摩擦死区等。L293D的使能信号可以起到调节脉宽的作用,给H桥电路输入不同的值后,那么马达向什么方位旋转就会有所不同。不仅如此,在L293D的一个芯片上存在有两个H桥电路,这就说明两个电机可以同时被一个芯片直接控制。电机含有三个必备的信号,一个是使能信号EN12,另外的是旋转方向的控制信号IN1和IN2。当IN1=1、IN2=0时,电机开始正向的进行转动,当IN1=0、IN2=1时,电机开始相反的进行转动。选中一PWM与使能端引脚相连接,那么PWM的占空比直接与整个电机的旋转速度挂钩。选中一I/O口,通过反向器74HC14与两个方向控制信号的引脚相连接,使其控制转向问题。
L293D引脚图如下图3-3所示。
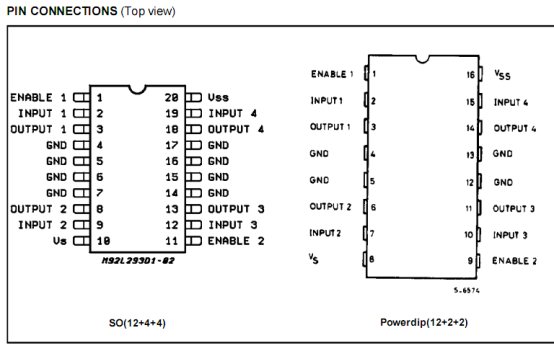
图3-3 L293D引脚图
其中L293D电路原理图和内部逻辑等效图如下图所示。
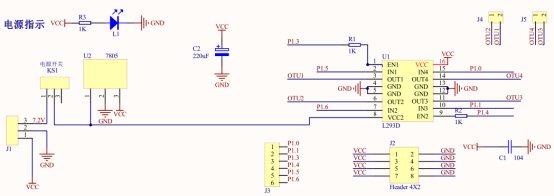
图3-4 电机驱动原理图
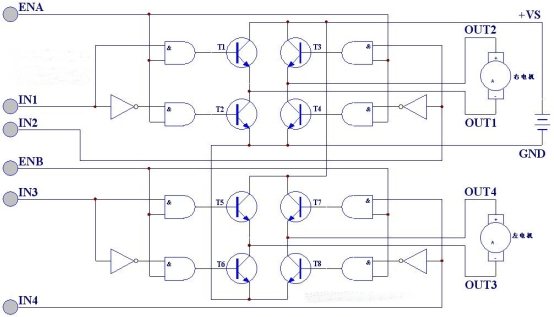
图3-5 L293D内部等效图3.4黑线循迹设计与实现
小车循迹的原理是在白色路面中贴有黑色胶带的轨道上运行,因为不同的颜色对光线的吸收程序不一样,自然反射回去的数据就不同,所以通过最后收到的反射光的情况就可以判断道路的黑白。本设计采用应用广泛且操作比较简单的红外光线探测方法。
红外光线探测法其实原理十分简单,就是红外线对于各种各样的颜色有不同的反射性质。小车开始前进,那么传感器的红外发射二极管就会往外放出红外线,若此时小车行驶在白色的路面上,置于车底的红外发射管发出的红外线会被反射回来,接收管一旦接收到红外信号,那么就会导通光敏三极管,从而输出低电平,经过电压比较器后送往单片机控制。若小车一旦开始位于黑色胶带轨道的上方,黑色物体就能够吸收一直释放出来的红外线,此时的三极管立即就被阻断了,放出的信号变化为高电平。这样一来用到红外线就可以判断是否有信号。然后前面的信号会被传送往单片机继续判断,若I/O口发现是高电平的信号,则意味着光线并没有被反射回来而是被黑色吸收,小车是处于黑色胶带上前进。相反,若是发现信号为低电平,说明车子正处于在白色路道上。即是说若小车底部的红外线接收管遇到黑线则输入电平为高电平,反之则为低电平。避障亦是此原理。
传感器原理图如图3-6所示。

图3-6 传感器模块电路原理图3.5红外避障电路的设计
红外线避障的原理和黑线循迹基本相似,都是利用光线反射性质,只要有阻碍物体在前方挡路,之前施放出的光线就可以被反射回来。所以传感器会输出的电平就为0,L3、L4灯会亮起来。当前方没有遇到障碍物时,由于传感器位于小车的上方,因此传感器反射能力不强,只能反射少许的红外光线,不能够使得传感器运作,所以传感器输出电平1。只要通过单片机来检测传感器的输出端电平是高还是低,就能得知是否遇到障碍。3.6超声波避障的设计3.6.1超声波避障原理
本设计实现避障功能选取的是超声波探测传感器。把这个传感器固定在小车的最前方,事先调整好测量的距离,只要在能够检测到的距离内,一旦有阻碍物体出现在道路前面,单片机就可以立即收到由传感器发来的信号,从而发出命令让小车开始改变原始的方向,避免撞上障碍物。所以超声波传感器的优点还是很多的,频率高,速度快,方向性又好。3.6.2超声波模块工作原理
本设计采用的是HC-SR04超声波探测模块,给一个高电平的信号(大于10千赫兹),HC-SR04模块就会释放出八个方波(约40千赫兹),而且检测是否信号返回来完全是自动的。一旦模块这边收到了返回的信号,就会让IO输出一个高电平,高电平维持了多长的时间,就表明超声波从发出到回来一共是多少时间。测试距离有一个公式等于高电平维持的时间乘以声速,因为是往返的距离,所以还要除以2。
选取超声波完成避障的电路连接如图3-7所示。
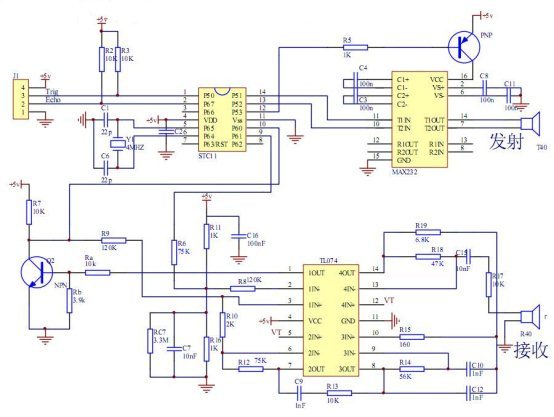
图3-7 超声波避障电路原理
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/180892.html原文链接:https://javaforall.net


