
大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE稳定放心使用
近日,开始学习图像处理,思前想后决定以opencv作为实验基础。遂完成图片读取和显示功能。Imread作为常用的图像读取函数,虽然简单,但是参数的选择非常重要,直接影响到后期处理。同时在调试学习过程中也可以学习到图像处理的知识。
1. 函数原型
Mat imread(const String& filename,int flags = IMREAD_COLOR);
返回Mat对象;参数filename: 待打开图片的绝对地址,需要注意的是,并不是所有文件都可以用它打开,它支持的文件如下;函数识别不是依靠文件的后缀名,而是依靠内容的编码格式;
需要注意的是imread读取数据时会重新排列数据。
- Windows bitmaps – *.bmp, *.dib (always supported)
- JPEG files – *.jpeg, *.jpg, *.jpe (see the Notes section)
- JPEG 2000 files – *.jp2 (see the Notes section)
- Portable Network Graphics – *.png (see the Notes section)
- WebP – *.webp (see the Notes section)
- Portable image format – *.pbm, *.pgm, *.ppm *.pxm, *.pnm (always supported)
- Sun rasters – *.sr, *.ras (always supported)
- TIFF files – *.tiff, *.tif (see the Notes section)
- OpenEXR Image files – *.exr (see the Notes section)
- Radiance HDR – *.hdr, *.pic (always supported)
- Raster and Vector geospatial data supported by Gdal (see the Notes section)
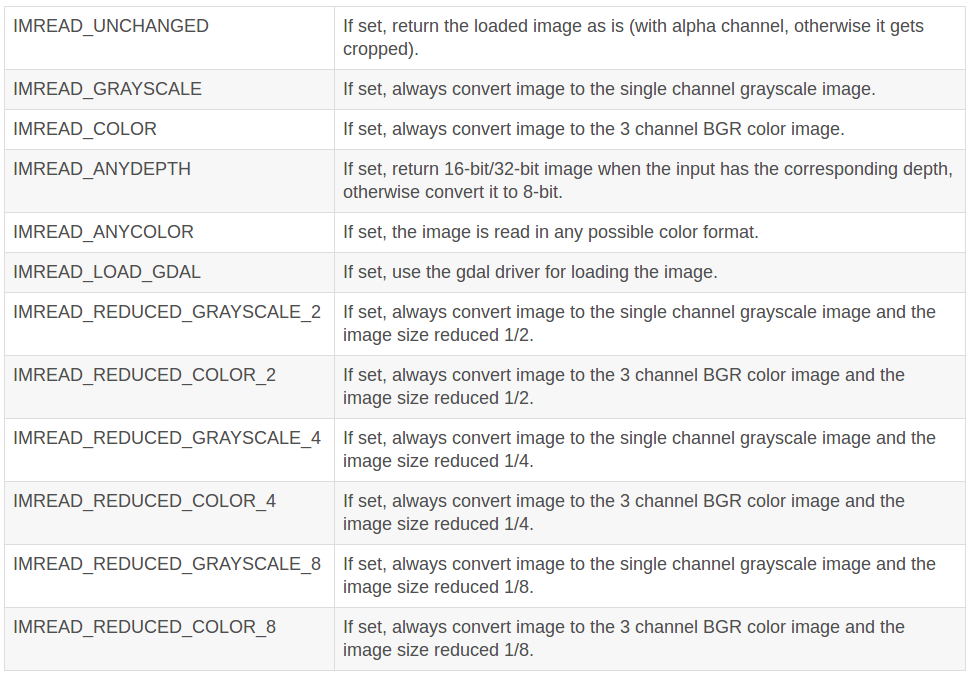
参数flags:打开的参数,这个非常重要,因为如果设置不合适的话,很容易出现预想之外的效果。它可以指导将原图读取时进行一定的转换。默认值是IMREAD_LOAD_GDAL。因此,如果是想直接处理原图,应该设置为IMREAD_UNCHANED。

2. 通道编码顺序
通道,与像素深度深度有关。灰度图通常是8比特的像素深度,则通道数为1。如果是彩色图,且为RGB编码,那么一般为24比特的像素深度,通道数为3。而有的彩色图的像素深度是16或者32比特。16比特可能有多种情况:一是压缩的RGB格式,二是YUV的输出。无论何种,都是只有2通道,需要手动解析分离。32比特(windows *.bmp)的像素深度对应的彩色图,则表示的是4通道,RGBA,多出的A表示的是透明度的索引。
另外读取时需要注意内部像素的编码顺序,这也依赖于imread的flags选项的取值,如果取值决定转成RGB,那么正常的顺序是BGR,排列顺序如下图所示。如果最后imread输出是四通道,多了Alpha通道,那么顺序是RGBA。
3, 图像像素通道数据访问
这部分可以借鉴网上资料,可以分为三种类型。
3.1 动态访问at<typename>(i,j)
Imread返回的mat类,提供了at模板函数。Image.at<uchar>(i, j);取出i行j列的数据,uchar可以理解为imread返回之后图像的编码类型(如1所述的通道)。如果是三通道,则可以是Vec3b,四通道则是Vec4b。
//CV_LOAD_IMAGE_UNCHANGED如果要取A分量那么flag最好设置成这个值
Mat image = imread("1_firstlai.png", CV_LOAD_IMAGE_UNCHANGED);
for(int i=0;i<image.rows;i++)
{
for(int j=0;j<image.cols;j++)
{
image.at<Vec3b>(i,j)[0]; //B
image.at<Vec3b>(i,j)[1]; //G
image.at<Vec3b>(i,j)[2]; //R
image.at<Vec4b>(i,j)[0]; //B
image.at<Vec4b>(i,j)[1]; //G
image.at<Vec4b>(i,j)[2]; //R
image.at<Vec4b>(i,j)[3]; //A
}
}
3.2 指针-更加高效
imgage.ptr<uchar>(i)。
int nr=image.rows;
// 将3通道转换为1通道
int nl=image.cols*image.channels();
for(int k=0;k<nr;k++)
{
// 每一行图像的指针
const uchar* inData=image.ptr<uchar>(k);
for(int i=0;i<nl;i++)
{
inData[i];
}
} 本质就是将每行的3/4通道数据转换为1通道数据访问,因为OpenCV内部存储每一行像素数据以及像素内部通道数据都是连续存储的。但是行与行的数据并不一定是连续存储的,所以不能应用在行与行之间。
3.3 结合isContinuous的指针
3.2中已经说明了,OpenCV中行与行之间不一定连续存储,也就是有可能连续存储,而且提供了对应的API支持判断是否连续这一现象,也可基于此,再提高访问速度。
int nr=image.rows;
int nc=image.cols*image.channels();
if(image.isContinuous()){
nc=nc*nr;
nr=1;
}
for(int i=0;i<nr;i++){
// 每一行图像的指针
const uchar* inData=image.ptr<uchar>(i);
for(int j=0;j<nc;j++){
inData[j];
}
}3.4 安全但低效的迭代器
3.1-3.3的方法虽然效率高,但是如果操作不小心,容易造成数组越界的Bug。所以opencv提供了一种更安全的访问方法-迭代器。
MatIterator_<Vec3b> it_im, itEnd_im;
it_im = im.begin<Vec3b>();
itEnd_im = im.end<Vec3b>();
for (; it_im != itEnd_im; it_im++, it_om++){
(*it_im)[0] ; //B
(*it_im)[1] ; //G
(*it_im)[2] ; //R
} ———————
作者:时行居正
来源:CSDN
原文:https://blog.csdn.net/firstlai/article/details/70882240
版权声明:本文为博主原创文章,转载请附上博文链接!
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/184192.html原文链接:https://javaforall.net


