
大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE使用 1年只要46元 售后保障 童叟无欺
1. 关键词
模仿学习:Imitation learning
2. 数据集
图像识别领域的数据集:ImageNet
目标检测的数据集:COCO
机器问答的数据集:SQuAD
3. 框架
斯坦福的李飞飞实验室,开源了分布式强化学习训练框架SURREAL,用来加速学习过程。
团队还发现,用SURREAL框架搭配上文的RoboTurk数据集服用,让人类教练来“手把手”训练机器人,疗效要比不经人类调教的AI好得多。
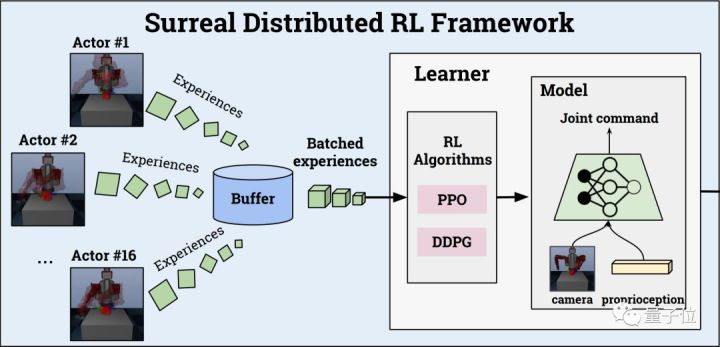

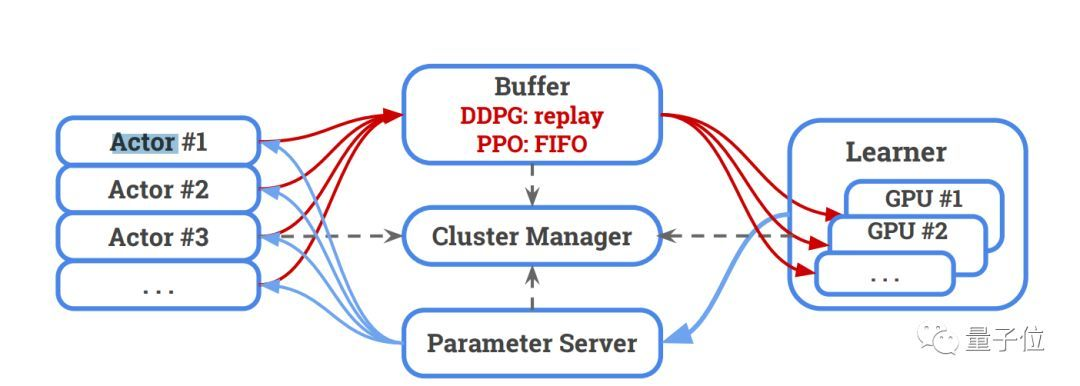
这个框架,把一个分布式RL算法,分解成四个部分 (图中由左向右) :
一是演员 (Actors) ,负责生成经验;
二是缓冲池 (Buffer) ,负责储存经验;
三是学习者 (Learner) ,根据经验来更新参数;
四是参数服务器 (Parameter Server) ,负责储存参数。
演员部分,是多个演员并行 (Parallel) 的,16个,32个,64个……都可以。
这样一来,AI可用的数据量,能够猛烈增长。
把数据生成和学习过程分开,不需要全局同步 (Global Synchronization) 了,可扩展性 (Scalability) 也就增强了。
另外,框架支持在线 (On-Policy) 和离线 (Off-Policy) 两种策略更新方式。
团队说,系统可以直接部署在云端或者PC端 (如谷歌云、AWS、Azure) ,轻而易举,只需4层:
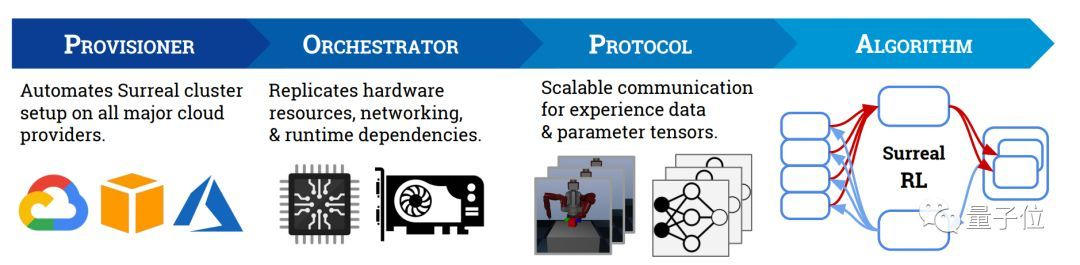
第一层,从配置器 (Provisioner) 开始,保障各个云平台的可复现性。
第二层,编配 (Orchestrator) ,用一个完善的云API来分配CPU/GPU资源,复制网络。
第三层,协议 (Protocal) 实现了高效的通信指令。
第四层,就是算法,用PyTorch实现的。
众包平台RoboTurk:
主页 https://crowdncloud.ai/
论文 RoboTurk: A Crowdsourcing Platform for Robotic Skill Learning through Imitation
加速训练的SURREAL:
主页 https://surreal.stanford.edu/
论文 SURREAL: Open-Source Reinforcement Learning Framework and Robot Manipulation Benchmark
4.大会/论坛
-
CoRL机器人学习大会(Conference on Robot Learning),由UC Berkrley、Google、微软、CMU、MIT等顶尖研究机构发起,Google、DeepMind、瑞士科研基金会(SNF)、Facebook、博世等赞助.
主页:https://www.robot-learning.org/home/program#schedule -
AAAI 2019,美国人工智能年会(AAAI Conference on Artificial Intelligence),简称 AAAI,是人工智能领域的顶级国际会议。该会议固定在每年的 2 月份举行,由 AAAI 协会主办。
官网:https://aaai.org/Conferences/AAAI-19/ -
ICLR 2019,国际学习表征会议(International Conference on Learning Representations),简称 ICLR,2013 年成立了第一届,由位列深度学习三大巨头之二的 Yoshua Bengio 和 Yann LeCun 牵头创办。
官网:https://iclr.cc/1.29 -
ICRA 2019,ICRA 全称为 IEEE International Conference on Robotics and Automation(机器人与自动化会议),是机器人技术领域最有影响力的国际学术会议之一,也是机器人研究人员展示他们作品的重要国际论坛。
官网:https://www.icra2019.org/1.13 -
ICML 2019,ICML 是 International Conference on Machine Learning 的缩写,即国际机器学习大会。ICML 如今已发展为由国际机器学习学会(IMLS)主办的年度机器学习国际顶级会议。
官网:https://icml.cc/Conferences/2019 -
CVPR 2019,CVPR 是 IEEE Conference on Computer Vision and Pattern Recognition 的缩写,即 IEEE 国际计算机视觉与模式识别会议。该会议是由 IEEE 举办的计算机视觉和模式识别领域的顶级会议。
官网:http://cvpr2019.thecvf.com/2.1-2.8 -
ACL 2019,国际计算语言学协会 (ACL,The Association for Computational Linguistics) 是自然语言处理和计算机语言学最顶尖的会议之一,其会员遍布世界各地,被 CCF(中国计算机学会)认定为 A 类国际学术会议,涵盖领域包括语言分析、信息抽取、机器翻译与自动问答等。
官网:http://www.acl2019.org/EN/index.xhtml5.13 -
KDD 2019,KDD 全称是 Knowledge Discovery and Data Mining,即知识发现与数据挖掘,由美国计算机协会 ACM 下的数据挖掘分会举办,是国际数据挖掘领域的顶级会议。
官网:https://www.kdd.org/kdd2019/4.28 -
IJCAI 2019,人工智能国际联合大会(International Joint Conference on Artificial Intelligence),简称 IJCAI,是国际人工智能领域排名第一的学术会议,为 CCF A 类会议。该会议起于 1969 年每两年举办一次,自 2016 年起每年举办一次。
官网:http://www.ijcai19.org/4.13-4.18 -
ICCV 2019,ICCV 全称为 International Conference on Computer Vision(国际计算机视觉大会 ),由 IEEE 主办,与计算机视觉模式识别会议(CVPR)和欧洲计算机视觉会议(ECCV)并称计算机视觉方向的三大顶级会议,每两年召开一次。
官网:http://iccv2019.thecvf.com/6.14 -
IROS 2019,IROS(全称 IEEE / RSJ International Conference on Intelligent Robots and Systems)是世界机器人和智能系统领域机器人最著名、影响力最大的顶级学术会议,一般是在欧洲、亚洲、美洲三大洲间循环举办。
官网:http://www.iros2019.org/6.30
5.相关论文
Motion Planning Networks, from UC San Diego Micheal C. Yip’s group, in ICRA, 2019
https://arxiv.org/abs/1806.05767
Learning and Inferring movement with Deep Generative Model, from Tsinghua Fuchun Sun’s lab, in ICML Workshop, 2019
https://arxiv.org/abs/1805.07252
Learning Plannable Representations with Causal InfoGAN, from UC Berkeley Pieter Abbeel’s group, in NeurIPS, 2018
https://papers.nips.cc/paper/8090-learning-plannable-representations-with-causal-infogan
CRAVES: Controlling Robotic Arm with a Vision-based, Economic System
https://zhuanlan.zhihu.com/p/69346868?utm_source=qq&utm_medium=social&utm_oi=903420714332332032
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/191888.html原文链接:https://javaforall.net


