
大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE使用 1年只要46元 售后保障 童叟无欺
本系列博客包括6个专栏,分别为:《自动驾驶技术概览》、《自动驾驶汽车平台技术基础》、《自动驾驶汽车定位技术》、《自动驾驶汽车环境感知》、《自动驾驶汽车决策与控制》、《自动驾驶系统设计及应用》,笔者不是自动驾驶领域的专家,只是一个在探索自动驾驶路上的小白,此系列丛书尚未阅读完,也是边阅读边总结边思考,欢迎各位小伙伴,各位大牛们在评论区给出建议,帮笔者这个小白挑出错误,谢谢!
此专栏是关于《自动驾驶汽车环境感知》书籍的笔记。
2.车载传感器之毫米波雷达和超声波雷达
2.1 毫米波雷达
概述:
- 毫米波雷达工作在毫米波波段探测的雷达,通过发射无线电信号并接收反射信号来测定与物体间的距离;
- 毫米波雷达采集的原始数据基于极坐标系(距离+角度);
- 调频连续波(FMCW),工作时,振荡器会产生一个频率随着时间逐渐增加的信号(chirp),这个信号遇到障碍物后,反弹回来,其时延为2倍的距离除以光速;返回的波形和发出的波形之间有一个频率差,这个频率差是呈线性关系的:物体越远,返回的波收到得越晚,它跟入射波的频率差值就越大;将这个频率做减法,得到两者频率的差拍频率,通过判断差拍频率的高低可以判断障碍物的距离;毫米波测速原理是基于chirp之间的多普勒效应;
工作原理:
在自动驾驶汽车领域,车载毫米波雷达通过天线发射毫米波,接收目标反射信号,经后方处理后快速准确地获取汽车车身周围的物体环境信息(如:汽车与其他物体之间的相对距离、相对速度、角度、运动方向等),然后根据所探知的物体信息进行目标追踪和识别分类,结合车身动态信息进行数据融合,通过电子控制单元(ECU)进行智能处理,经合理决策后,以声、光及触觉等多种方式告知或警告驾驶员,或及时对汽车做出主动干预,从而保证驾驶过程中的安全性和舒适性,减少事故发生的概率;
优缺点:
- 高分辨率,小尺寸。
- 与红外、激光、电视等光学导引头相比,毫米波导引头穿透雾、烟、灰尘的能力强,测距精度受天气影响和环境因素影响较小,可以基本保证车辆在各种日常天气下的正常工作;
- 毫米波雷达可以直接测量距离和速度信息;
- 与微波雷达相比,毫米波雷达的发射机的功率低,波导器件中的损耗大;
- 行人的后向散射截面较弱,如果需要探测行人,雷达的探测阈值需要设低,其负面效应可能会有更多虚报物体出现;
- 毫米波器件昂贵;
毫米波雷达在自动驾驶汽车中的应用:
- 自动驾驶汽车上的毫米波雷达频率分为:24GHz和77GHz;
- 24GHz频段的雷达通常用于感知车辆周围的障碍物,为换道决策提供感知信息,能够实现的功能:盲点监测、变道辅助;
- 77GHz频段的雷达波长更短,产品尺寸小,最大检测距离可达160m以上;77GHz毫米波雷达能够用于实现紧急制动、高速公路跟车等ADAS功能;
- 由”光速=波长×频率”可知,频率越高,波长越短;波长越短,分辨率越高;
- 毫米波雷达实现自适应巡航等功能的核心技术:目标识别与追踪;
- 在接收天线收到雷达回波并解调后,控制器对模拟信号进行数字采样并做相应的滤波;
- 用快速傅里叶变换(FFT)手段将信号变换至频域;
- 寻找信号中距离、速度和角度信息,用阈值来去掉噪声值留下信号能量峰值;
- 将可能属于同一物体的反射点匹配到同一个反射点集群中;
- 通过跟踪各个反射点集群,形成对物体的分布的预测;在下一个测量循环中,如通过卡尔曼滤波,基于上一次的物体分布,预测本测量循环中可能的物体分布;
- 尝试将当前得到的反射点集群与预测结果进行匹配,如通过比较物体的位置和速度等参数;
- 当反射点集群与上一测量循环得到的物体信息匹配成功时,得到该物体的”轨迹”,同时该物体的可信度增加,反之则可信度下降;只有当一个物体的可信度超过一定门限时,该物体才会成为我们关心的目标而进入所谓的目标列表;
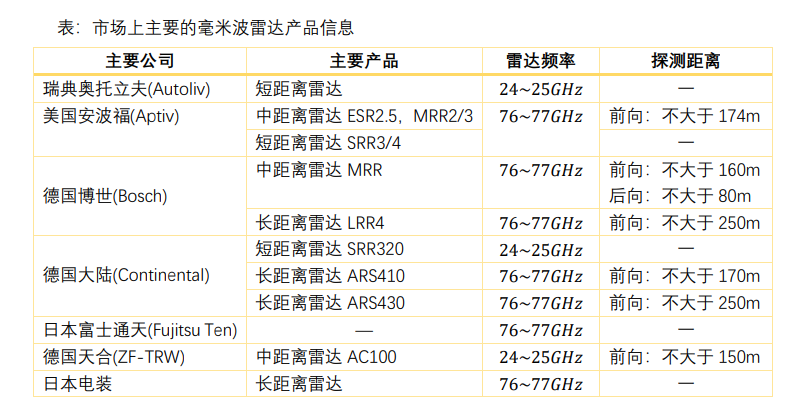
市场上主要的毫米波雷达产品:

2.2 超声波雷达
概述:
- 超声波雷达是通过发射并接收40kHz的超声波,根据时间差算出障碍物距离,测距精度大约1~3cm;
- 构造一般分为:等方性传感器和异方性传感器;
- 等方性传感器为水平角度与垂直角度相同,等方性传感器垂直照射角度过大,容易探测到地,无法侦测较远的距离;
- 异方性传感器水平角度与垂直角度不相同,异方性超声波探头产生的超声波波形强弱较不稳定,容易产生误报警的情况;
- 常见的超声波雷达:
- 安装在汽车前后保险杠上,用于测量汽车前后障碍物的倒车雷达,称为超声波驻车辅助传感器(Ultrasonic Parking Assistant,UPA);
- 安装在汽车侧面,用于测量侧方障碍物距离的超声波雷达,称为自动泊车辅助传感器(Automatic Parking Assistant,APA);
工作原理:
- 超声波发射器向外面某一个方向发射出超声波信号,在发射超声波的同时开始计时,超声波通过空气进行传播,传播途中遇到障碍物立刻反射回来,超声波接收器在接收到反射波时立即停止计时;
- 计时器通过记录时间,测算从发射点到障碍物间的距离;
- 在空气中超声波的传播速度为340m/s,计时器记录的时间为t,发射点到障碍物间的距离长度为s,满足:s=340t/2;
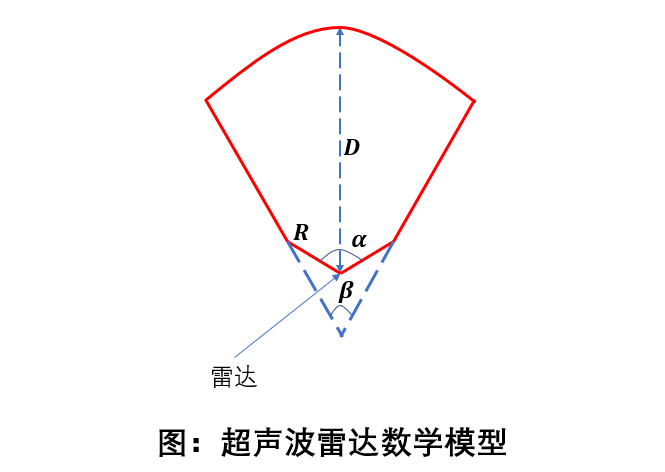
- α \alpha α为超声波雷达的探测角,一般UPA探测角为120°左右,APA探测角为80°左右;
- β \beta β为超声波雷达检测的宽度范围影响元素之一,一般UPA的 β \beta β为20°左右,APA的 β \beta β为0°;
- R是超声波雷达检测宽度范围影响元素之一,UPA和APA的R值一般0.6m左右;
- D是超声波雷达最大量程,UPA最大量程为2.5m,APA最大量程至少是5m;
超声波优缺点:
- 超声波能量消耗缓慢,防水、防尘性能好,传播距离较远,穿透性强,测距方法简单,成本低,不受光线条件的影响;
- 但超声波对温度敏感,超声波雷达的波速受温度影响,近似关系: C = C 0 + 0.607 × T C=C_0+0.607\times{T} C=C0+0.607×T
其 中 , C 0 为 零 度 时 的 波 速 , 为 332 m / s ; T 为 温 度 , 单 位 : ℃ 其中,C_0为零度时的波速,为332m/s;T为温度,单位:℃ 其中,C0为零度时的波速,为332m/s;T为温度,单位:℃ - 超声波散射角大,方向性较差,无法精确描述障碍物位置;
超声波雷达在自动驾驶汽车上的应用:
- 倒车辅助;
- 泊车库位检测;
- 高速横向辅助。
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请联系我们举报,一经查实,本站将立刻删除。
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/194970.html原文链接:https://javaforall.net


