
大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE使用 1年只要46元 售后保障 童叟无欺
文章目录
前言
之前关于ROS学习的博客,都是在win10虚拟机环境下运行的ubuntu18.04系统,对应的ros版本为melodic。由于电脑性能不好,运行导航仿真感觉卡顿,所以我把家里的台式机搞成了ubuntu16.04和win10双系统。ubuntu16.04系统的安装网上很多资料,本篇只是记录下ros的安装步骤,仅供参考。
一、添加ROS软件源(sources.list)
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
二、添加密钥
sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key F42ED6FBAB17C654
三、更新apt功能包列表
sudo apt-get update
四、安装ROS
sudo apt-get install ros-kinetic-desktop-full
五、初始化 rosdep
执行如下命令:
sudo rosdep init
若出现错误,如图:


针对此错误,我尝试过修改/etc/hosts文件,也常试过修改网络为手机热点,但是问题依然存在。
最终解决方法如下:
(1)修改/usr/lib/python2.7/dist-packages/rosdep2/sources_list.py文件
(2)修改/usr/lib/python2.7/dist-packages/rosdistro/_init.py文件
(3)修改如下文件
/usr/lib/python2.7/dist-packages/rosdep2/gbpdistro_support.py 36行
/usr/lib/python2.7/dist-packages/rosdep2/sources_list.py 72行
/usr/lib/python2.7/dist-packages/rosdep2/rep3.py 39行
/usr/lib/python2.7/dist-packages/rosdistro/manifest_provider/github.py 68行 119行
具体修改方法,参考评论(修改点1、2、3),写在这里,不能发布,哈哈,绝了。。。
修改完成后,再次执行如下命令:
sudo rosdep init
初始化成功,如图:

初始化成功后,执行如下命令:
rosdep update
若出现超时错误,如图:

解决方法,如下:
(1)打开/usr/lib/python2.7/dist-packages/rosdep2/gbpdistro_support.py 文件
第204行添加如下代码,参考评论(修改点4)
(2)打开/usr/lib/python2.7/dist-packages/rosdistro/__init__.py
在对应处,按照上述方法进行修改,参考评论(修改点5)
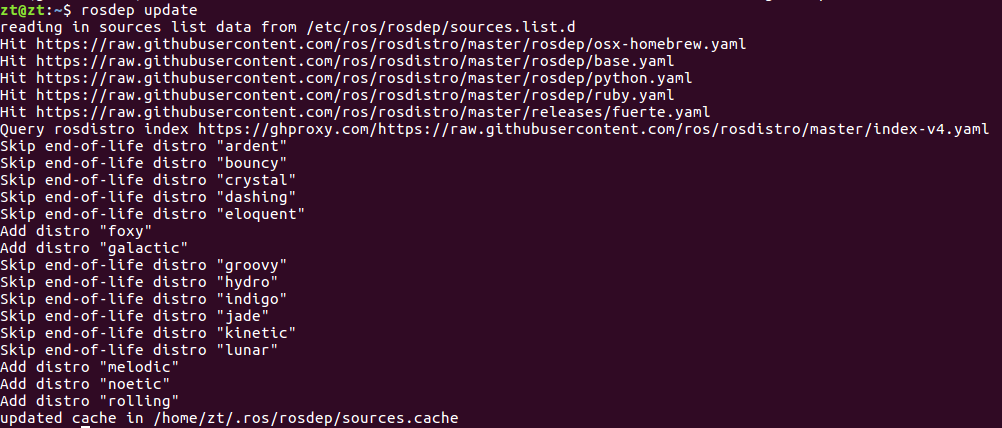
最后再次执行如下命令:
rosdep update
最后发现,问题解决了,如图:
六、将ROS环境变量添加到.bashrc文件中
此举是为了每次打开新的终端时可以自动配置好 ros 相关环境。
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
七、安装rosinstall等工具
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
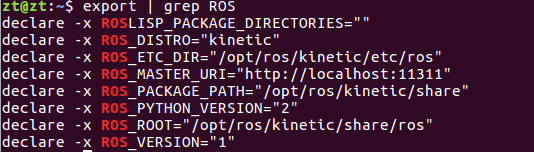
八、检查ROS是否安装成功
如果安装成功,可以看到ros版本及路径等信息,命令如下:
export | grep ROS
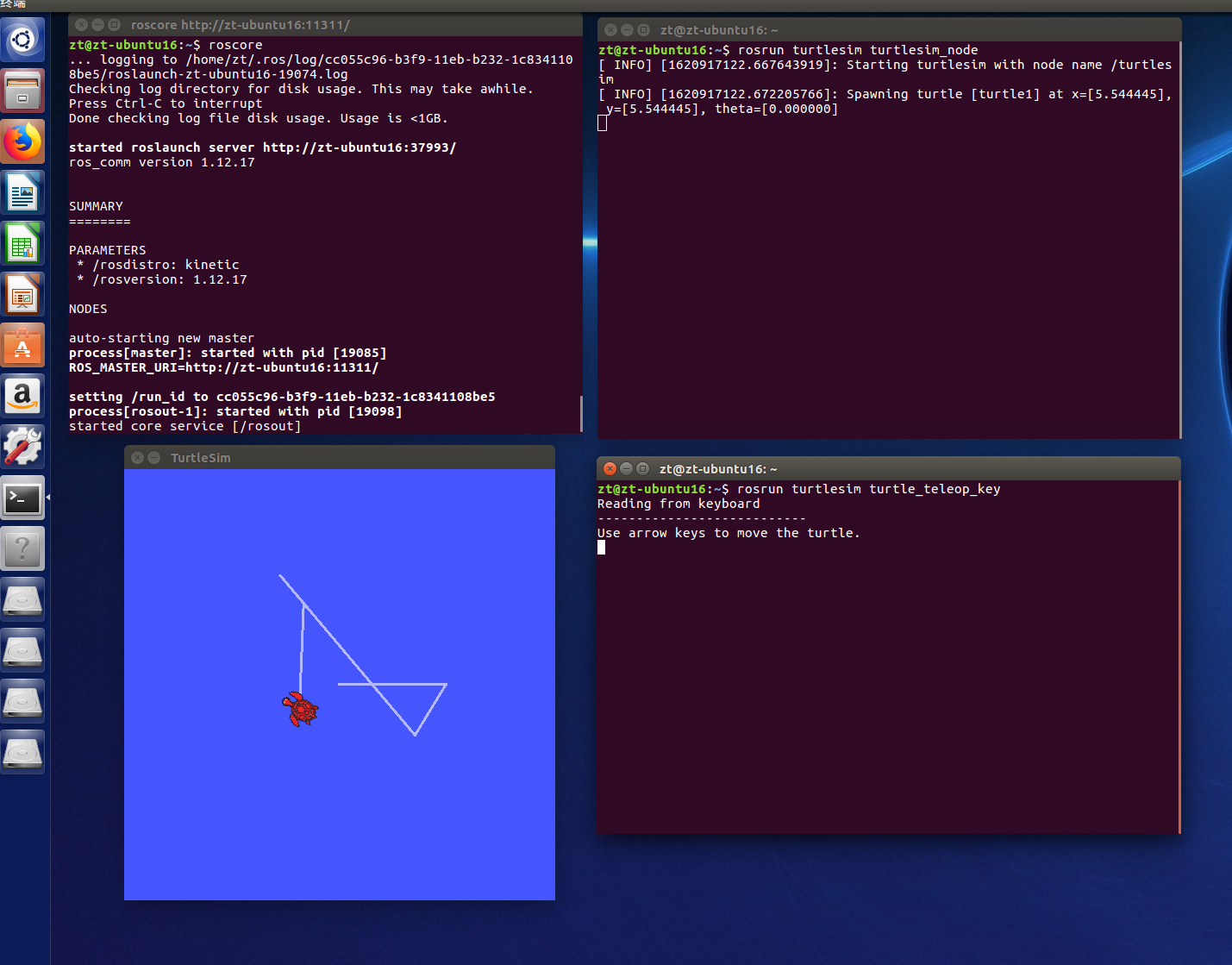
我们也可以启动小乌龟来检查ROS是否安装成功,打开三个终端,分别输入如下命令:
roscore
rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_teleop_key
效果如下:
九、卸载ROS
sudo apt-get purge ros-*
sudo rm -rf /etc/ros
十、总结
本篇文章只解决我遇到的错误,若不能解决你的错误,请自行百度,哈哈,网上的资料还是很多的。最后,如果顺便解决了你的问题,请大佬们给小弟点个赞,谢谢啦,只为刷刷排名,哈哈。
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/197821.html原文链接:https://javaforall.net


