
大家好,又见面了,我是你们的朋友全栈君。
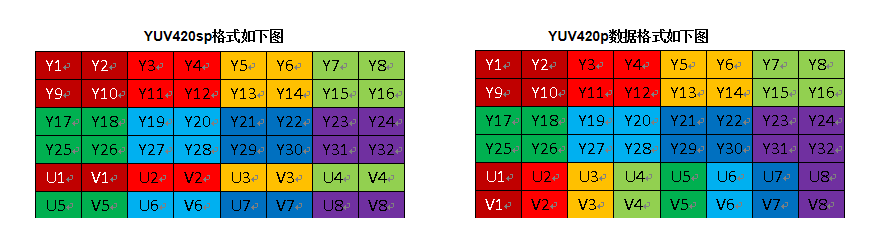
UV420sp与YUV420p的数据格式区别在于UV排列上的完全不同
。420
p
它是先把U存放完后,再存放V,
如下图
。而420sp它是UV、UV这样交替存放的。
有了上面的理论,我就可以准确的计算出一个YUV420在内存中存放的大小。
Y = width * height(像素点总数)
U = Y / 4
V = Y / 4
所以YUV420 数据在内存中的大小是 width * height * 3 / 2 Bytes,
设一个分辨率为8X4的YUV图像,它们的格式如下图:

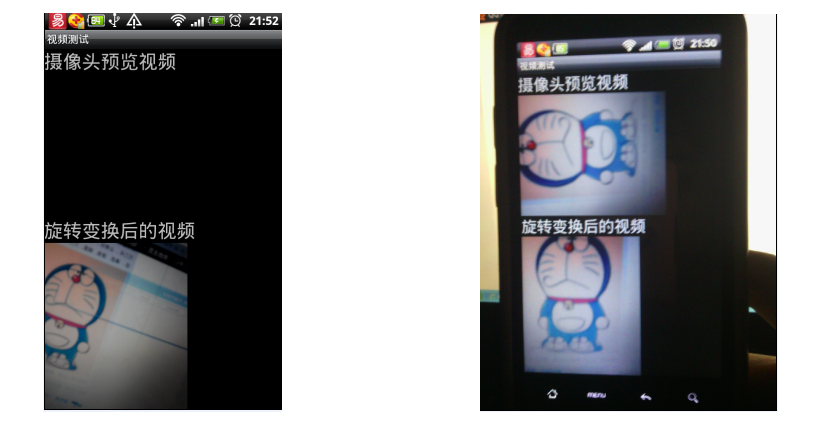
有了上边的理论,我们可以对Android摄像头采集的YUV420sp数据做很多的转换,下面我写一个旋转90度的算法。
代码如下
static void rotateYUV240SP(byte[] src,byte[] des,int width,int height)
{
int wh = width * height;
//旋转Y
int k = 0;
for(int i=0;i<width;i++) {
for(int j=0;j<height;j++)
{
des[k] = src[width*j + i];
k++;
}
}
for(int i=0;i<width;i+=2) {
for(int j=0;j<height/2;j++)
{
des[k] = src[wh+ width*j + i];
des[k+1]=src[wh + width*j + i+1];
k+=2;
}
}
}
运行结果效果如下:
上边视频是摄像头的预览数据(预览数据的图像截图看不见,郁闷啊),所以我为了能让大家看到效果,专门拍了一张照片。
转自:http://blog.csdn.net/jefry_xdz/article/details/7931018
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/127551.html原文链接:https://javaforall.net


